Өнеркәсіптік робототехника: тарихы, жіктелуі және технологиялық қолданылуы

КІРІСПЕ
Мемлекетіміздің халық шаруашылығының экономикасын көтеруде өнеркәсіпті және өндірістік үрдістерді механикаландыру мен автоматтанырудың маңызы зор. Қазіргі кезде еңбек өнімділігін арттыру үшін робототехниканың түрлі үрдістері автоматтандырылудың негізі болып табылады.
Робототехника ғылым мен техниканың роботтар мен робототехникалық жүйелерді жасауға байланысты тез дамитын саланың бірі болып табылады. Бұл ғылым механика мен кибернетика ғылымының негізінде жаңа сала болып орнықталды. Бұл ғылымның зертелетін негізгі объектілерінің бірі болып адамның интелектуалдық және қозғалыс функцияларын орындайтын әмбебап автомат - робот болып табылады. Адамның қозғалыс және интелектуалдық функцияларын орындау дәрежесіне қарай роботтар да түрлі топтарға жіктеледі. Бұл роботтардың ішіндегі маңызды тобына манипуляциялық роботтар жатады. Осы роботтардың жеке түріне жататын өнеркәсіптік роботтардың ерекшеліктері олардың артқару органдарының бар болуы.
«Робототехника» (немесе «роботика», «robotics») сөзі ең бірінші рет Айзек Азимовтың 1941 жылы жарық көрген ғылыми-фантастикалық «Жалғаншы» («Лжец») атты әңгімесінде қолданылған.
«Робототехника» сөзінің негізін қалайтын «робот» сөзін 1920 жылы Карел Чапек деген чехиялық жазушы алғаш болып ойлап тауып, өзінің 1921 жылы қойылып, көрермендердің ілтипатына ие болған ғылыми-фантастикалық «Р. У. Р. » («Россумские универсальные роботы») атты пьесында қолданған. Сол пьесада зауыт бастығы адамдарға ұқсас роботтарды ойлап табады да, тоқтатпай жұмыс істетеді. Басында андроидтар адамды мінсіз тыңдап, жұмыс істейді, алайда кейіннен қарсы шығып, өз жаратушыларын жояды.
Робототехника саласына кейіннен кірген идеялар көне заманда пайда болған. Мысалы, Гомердің «Илиадасында» Гефест деген құдай үй қызметкерлерін атлыннан жасап, сөйлеу қабілетімен қоса оларға күш пен ақыл берген (қазіргі тілмен айтқанда - жасанды ақыл) . Кейбір әңгімелер бойынша, ежелгі Грекия елінің инженер-механигі Архит Тарентский ұшу қабілеті бар механикалық көгершінді құрастырған (б. ғ. 400 ж. ) . Оған қоса, ұқсас мәліметтер И. М. Макарова мен Ю. И. Топчееваның әйгілі «Робототехника: Тарихы мен перспективасы» атты кітабында роботтардың әлемнің дамуындағы атқарған (немесе атқаратын) рөлі туралы баяндалады.
- Технологиялық процестегі роботтар
1. 1Өнеркәсіптік роботтардың жіктелуі мен қолданылу аймағы
Өнеркәсіптік роботтар жинақталын автоматтандырылған өндірістік процестің әмбебапты құралы болып табылады. < Өнеркәсіптік робот манипулятор түрінде тұракты жылжымалы автоматты машина болғандықтан, бірнеше қозғалыс дәрежесіне тұрақты бағдарламалармен өзгертіліп, жаңаша бағдарламалы құрылым ретінде өнеркәсіп процесінде қозғалыс және басқарушы қызмет атқарады. Қазіргі кезде өнеркәсіпті робот өндірісті техналогиялық ( құмсебу арқылы өндеу лактау жинау және т. б) және қосымша операциялар (процестерді балғаларды темір кесетін білдектерді күту, артып тиеу және жүк козғалысын қамтамасыз ету қызметін атқарады. Сондай-ақ өнеркәсіптік робот өндірісті техналогиялық жетілдіру, білдектердің өнімділік тиімділігі арттыру және жұмыс күшін азайтуға мүмкіндік туғызады. Металкескіш жабдықтауды автоматтандыру кезінде ӨР көмегімен дайындаманы білдектің жұмыс бетіне орнатамыз, дайындаманы білдектен тартуына (жинақтауыш) және дайындаманың білдектен білдекке берілуіне, дайындаманың үдіріс кезінде дөңгелете өңдеуді, дайындаманың және бейімдеменің негіздік бетінің кедір- бұдырлығына және аспаптан ауысуы кезінде негізгі рөл атқарады. Алайда, ӨР игерішін қолдану үшін технологиялық операцияның немесе күтудің орындалуы технологиялық жабдық жасауға қажетті арнаулы жабдықтауды да ескергеніміз жөн. Бұл ретте өндірістегі ұйымдастыру жұмыстарына жоғары талап қойылады, демек дербес жағдайда дайындамалармен қамтамасыз етуге, соңғы дәлдік сапасына айрықша мән беріледі.
Өнеркәсіптік роботтардың ақпараттық мүмкіншіліктеріне байланысты төмендегідей үш кезеңге бөлінеді:
1-кезеңдегі роботтар (дағдыланған) машинажасау өнеркәсібінде кеңінен қолданылады. Олар танығыштық пен бағдарламаларды есте сақтау қабілетіне орай түрлі операцияларды орындауға қабілетті. Осы жұмыстарды орындау барысында жұмысшы ортада шектеулі мүмкіндігі бар және қоршаған орта жағдайына бейімделе алмайды, сол үшін қалыпты жағдайға бейімделу мақсатында арнайы бағытталған жабдық қажет етіледі. Сонымен қатар аталмыш робот құрылымы мен қайта баптауды жеңілдету үшін қатаң бағдарламамен жұмыс істейді.
2- кезеңді роботтар (бейімделген) сезгіш немесе түйсіну бергіштердің көмегімен қоршаған сыртқы ақпаратты қабылдайды. Оларда жарты басқарманың ұйымдастырушының жүйесі қойылған, үйрету және бейімделулер мен игерушілік ЭЕМ. Жұмыстарда негізгі бағдарлама және жай бағдарлама болады, олар сыртқы ортаны ақпаратқа байланысты таңдайды. Демек, мынадай жұмыстар ЭЕМ бар немесе қызмет көрсету ЭЕМ, көру және сезгіш қабілетке ие болады және қоршаған ортаны бағдарлауға да қабілетті.
3-кезеңді роботтар (зияткерлік ) жасанды парасатпен бөлінген және өзіндік үйрету зейініне ие болады. Олар "ақылды" және "ойлаушы"роботтар деген атауларды алды және белгілі жағдайда заттарды тануға қабілетті.
Сондықтан қойылған мақсатты жоспарлай алу және бақылаудың орындалуын қарастырады. Арада айтылмыш уақиғада жұмыстың ақырғы мақсаты қойылатындықтан, тек алгоритімді іздеу жұмыстары іске асырылады. 3- кезеңді роботтың ақпараттық мүмкіндіктері 2-ші кезеңді роботтарға қарағанда жоғары. Зияткерлік роботтармен басқау үшін есептеу техникасының құралы ретінде, көбінесе ЭЕМ қажет етіледі.
Өнеркәсіптік роботтар әмбебаптық дәрежесіне қарай төмендегідей түрлерге бөлінеді:
- Әмбебапты, өндірістің кез келген түріне тәуелсіз негізгі және көмекші операцияларды кешенді түрде орындау мақсатына арналған;
- арнайландырылған, технологиялық операциялардың анықталған түрлерін ғана немесе жабдықтардың анықталған топтарына ауыстырмалы автоматтандырылған қарпу құрылғыларымен шектеулі қозғалу дәрежесімен қызмет көрсетуге арналған.
- арнайы, бір немесе үш қозғалмалы дәрежелі белгіленген бағдарламаға ие нақты технологиялық операцияларды орындауға арналған;
- өнеркәсіптік роботтар орындаушы операцияларының сипаттарына қараы мынадай түрлерге бөлінеді; - операциялық, технологиялық процестерді мүлтіксіз орындайтын (бояу, дәнекерлеуші, тойтармалау, жинау және т. б. ) ;
- транспорттық, немесе кызмет көрсетушілер, қосалқы өткел немесе ауыспалылықтың (алу, алып өту, орнату және т. б. ) технологиялық жабдықтың күтуін де конвейерлік сызықтың және қоймалардың операцияларын орындайды.
Өнеркәсіптік роботтар құрылымдық орындалу сипатына байланысты және білдекпен байланысуына қарай стационарлы (едендегі), аспалы (білдекке қатыссыз орнатылған, арнайы таянышта порталды және консолды түрде ілінген) және жылжымалы.
Өнеркісіптік роботтар (ӨР) жүк көтергіштігі (МЕСТ 25204-82) бойынша өте жеңіл (0, 08-1, 0 кг), жеңіл (1, 25-10 кг), орташа (12, 5-200 кг ) және ауыр (250-1000 кг ) түрлерге бөлінеді. Жұмыс органдардың күштік жетек түрлеріне байланысты өнеркәсіптік роботтар гидрожетекті, пневможетекті, электр жетекті және құрама жетекті болады.
Роботтарды жұмыс істейтін кординат жүйесіне байланысты декарттық (түзу бұрышты), цилиндрлік, сфералы және аралас болып жіктеледі.
1. 2 Өнеркәсіптік роботтарды құрылымды және кинематикалық талдау
Өнеркәсіптік роботтар автоматты түрде берілген бағдарлама бойынша өңдеулі дайындама немесе атқарушы орган арқылы жұмыс істеу керек. Күрделі өндірістік атқаратын қызметін орындау үшін робот алымын, өңдеудің тұтқыр құрылымын білу керек; механикалы қолдар қозғалшықтықтың көп дәрежесімен, жылжығыш алым құрылымының көрінген жағдайға жұмыс зонасы керек; арнаулы позициялауда құрылымының механикалық қолдың орын ауысуы; басқару жүйесі немесе есептеуіш машинаның жад құрылымында сақталып тұрған технологиялық тізбектіліктер операциясы туралы ақпарат беріп отырады. Яғни роботқа қажетті әмбебаптылықты пайдалануға мүмкіндік беру үшін және әртүрлі операцияларды орындау үшін, оның механизмдері манипуляциялық майысқақтыққа ие болуы керек.
Берілген координат саны арқылы дайындаманың қозғалуы, қозғалтқыштың дәрежесінің санын анықтайды. Қозғалтқыш дәрежесінің саны артқан сайын роботтың манипуляциялық майысқақтығы артады. Роботтың механикалық қолының қозғалу мүмкіндітері оның құрылымына, түріне, тізбекті кинематикалық кірістің орналасуына байланысты анықталады. 1-кестеде роботтың механикалық қолының құрылымдық схемалары және жұмыс істеу аумағы мен күтулері көрсетілген.
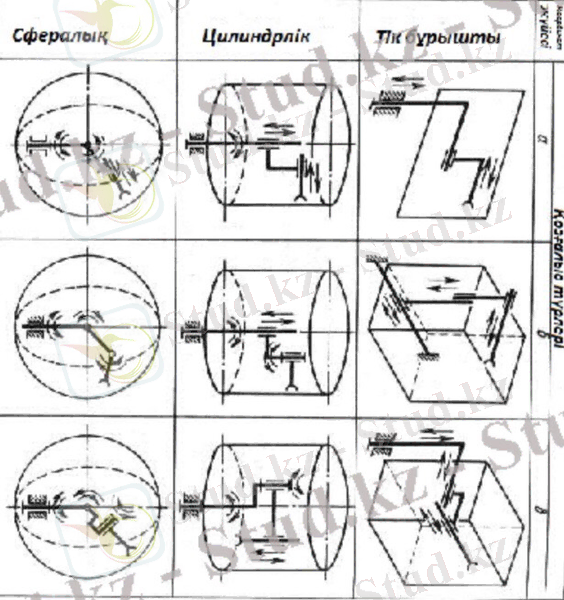
1. 1-сурет - Роботтың механикалық қолының құрылымдық сұлбасы
Роботтың қолы берілген жұмыс аясының кез келген нүктесіне жетеді. Егер парметрлердің және осьтердің аралық өлшемдері өзгерсе, онда роботтың конфигурациясы, алып тұратын жұмыс аумағы өзгереді.
1. 2-сурет - Циклон-5. 0. 1 өндірістік роботы
Роботтың қол шоғының орын ауысуы ара координаттар арқылы тіктөртбұрыштың жүйесінде және көмек екі тік қозғалыстардың (а), ара координат тіктөртбұрыштың көлемінде жүйе - мен көмек екі тік және бір тік қозғалыс (а), немесе екі айланс және бір айланс қозғалыс (б, в) . Бағдарлау қозғалысын ӨР механикалық қолдың шоғынның кинематикалық қамтамасыз етеді. Мысалы үшін 1-суретте көрсетілген Циклон-5. 0. 1 өндірістік роботы, жонғыш білдектерді, пресстерді (баспақтарды) және де басқа да технологиялық жабдықтарды күтуге арналған. Онда бір немесе екі механикалық қол болады, 1. алым. 2. Жетектің барлық негізгі тетіктері сыртқы бөлікке бекітілген. 3. Механикалық қол радиалды және вертикалды бағыттарда орын ауыстыра алады және де вертикалды ось маңайы бойынша бұралады. Алым горизонталь ось бойынша бұралады.
Барлық қозғалыстар 1 - суретте нұсқағыштармен көрсетілген. Робот 4 - 7 қозғалғыштық дәрежелерге ие. Жұмыс аумағы цилидрлі координат жүйесінде бейнеленеді. Жетек пневматикалық болып келеді. Жүк көтерімі 10(5) кг. Позицияларының дәлме - дәлдігі +- 0, 1 мм. Басқарманың жүйесі циклдық. ӨР технологиялық мүмкіндіктердің ең маңызды элементтері алымның құрылымдары болып табылады. Олар ара үдеріс ауыспалылықтың алым және манипулярлы нысанды тоқтатуға арналған. Конструкциялау кезде тасу жүргізетін дайындаманың пішіні (алымның еріншесінің (губканың ) айқындауыш конфигурациясы), оның сипатының (морттығы, беті және т. б), кедір - бұдырлығы, технологиялық үдерісі (температуралық қызуы, жарылу қауіптігі), және технологиялық жабдықтаудың өзгешілігі шарттары ескертіледі. Алымның құрылымдарын тез ауыстырылым ретінде орындайды. Конструкциялауда ескеруге қажетті өзара алмасылымдылықтың талабының қамсыздандыруы мүмкіндіктерін, қаталдықтарды және алым құрылымының дәлме - дәлдіктерін ӨР механикалық қолымен іске асырады. Алымның құрылымдарын ашық және берік, басқарылатын және басқарылмайтын депбірнеше түрлерге бөлуге болады. Басқа ырғақтың үлгісінің алымды, тістеуіктердің бір немесе екі қозғалғыш еріншелерімен (губкалармен ), вакуумды, сериалы немесе электромагниттік алымды құрылымдары бар. Алым механизмдердің кейбір түрлері 1. 3 - суретте көрсетілген. Қысқыш атты алымдар (1. 3 -сурет - а, б) .
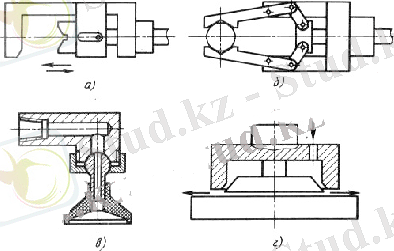
1. 3- сурет - Қысу құралдарының түрлері а - бір жылжымалы ерінмен; б - екі жылжымалы ерінмен; в - вакуммды; г - сорғалап ағатын -
Жетек еріншелері ретінде пневматикалық және гидравликалық жетектер немесе серіппелер қолданылуы мүмкін. Вакуммды қысу құралдары (3, в- сурет) сорғылы немесе сорғысыз болып екіге бөлінеді. Ал сорғалап ағатын қысқыш аспаптарда дайындаманы қысуы дайындаманың жазық бетімен қысу құралының жазық беті арасындағы ауаның азаюының аэродинамикалық әсерінен болады.
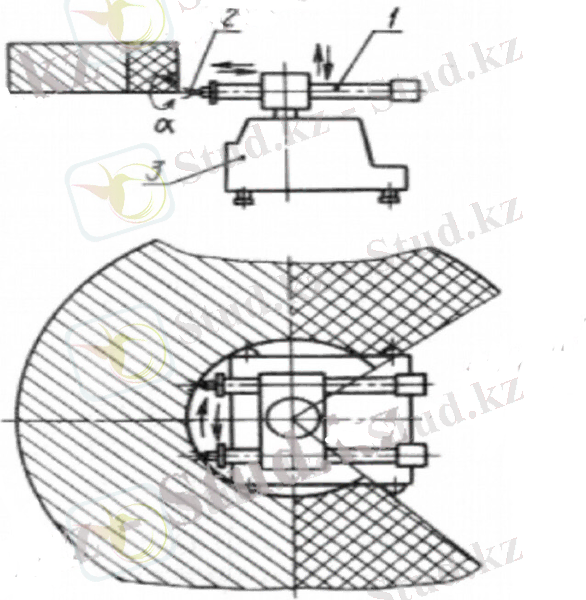
1. 4-суретте екі ерінді, пневматикалық жетекті кенелік қысу конструкциясы көрсетілген. Дайындама иінтірекке (2) бекітілген призма (1) ішінде қысылады. Иінтіректер сырғамен (4), шаңышқымен (3) топсалы бірігу арқылы жалғасқан. Тұрқыда (5) поршень (9) сояуышы (7) жылжитын төлке (6) орналасқан. Цилиндрдің (11) бір жақ беті тұрқымен, ал екінші беті қақпақпен (10) жабылған. Жону кронштейнінде (12) қысу құралының тұрқысы орналасқан. Сояуыштың серіппеден (8 ) жоғары жылжуы әсерінен қозағалыс иінтірек жүйесі арқылы призмаға беріледі де дайындама қысылады. Дайындама қысылған кезде сығыған ауа цилиндарге беріледі, сояуыш төмен түседі дайындама босатылады.
- Осы тәріздес қысу құралдары пневматикалық дайындама қысу түрлерінде қолданылуы мүмкін, бірақ ол үшін интірек жүйесінің параметрлерін өзгерту керек.
ӨР механизмының құрылымы (қысу құралдар, саусақтары және т. б) үлкен әр түрліліктермен ерекшеленеді. Қысу құрылғылары ӨР-дың саусақ буыны арқылы байланысады. Ол дайындаманы қысу кезіндегі мөлшерлеуді қамтамасыз етеді. Механикалық саусақтар қысу құрылғысының буыны арқылы қозғалады. Олар әрүрлі қыймылдарды орындай алады және құралдардың ішінде бастысы болып саналады.
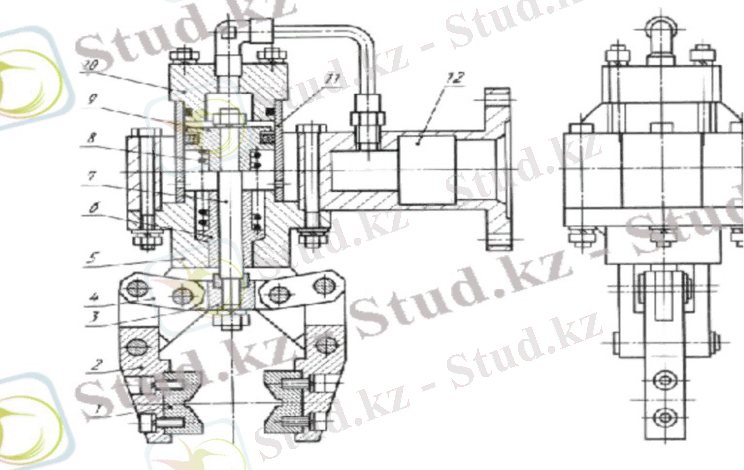
1. 4-сурет - Екі ерінді жылжымалы қысу құрылғысы
Саусақтарының құрылысы топсалы жіне бунақсыз болуы мүмкін (адам саусағындай), механизмдердің жылжуына кілдешті беріліс, поршеньді цилиндр және т. б. қолданылады. Бұрылу қос бұрамдық, қалақты гидроцилиндр, толқынды беріліс арқылы жүзеге асуы мүмкін. ӨР құрылымында бұрамдықты, цилиндрлік, планетарлық, конусты тісті, кілдешті, бұрандалы, шынжырлы, арқанды жіне таспалы берілістер және гидро-пнемоцилиндралер қолданылады
2 Өнеркәсіптік роботтарды өңдеу
2. 1 Әлемдегі ең үлкен және ең танымал роботтарды өндірушілер
Ірі халықаралық корпорациялар өнеркәсіп робототехника өндіру және насихаттау, дамыту жолдарын жетекші, холдингтер, корпорацялар мен компаниялар:
iRobotCorporation (АҚШ) . Әскери роботтарды мамандандырады - мергендер, құтқару, барлау, сондай-ақ тұрмыстық - шаңсорғыштар және тазалау роботтар. 2013 жылға қарай компания 10 млн астам уй роботын сатылды. Соңғы 10 жылда 2004 жылдан 2014 жылда компания 95 - тен 505 млн. долл. - ға сату ккөлемін үлкейтті және жылына нөлдік көрсеткіштен 25 млн. доллора дейін өсті Компаниядағы роботтарды ең танымал және әйгілі түрлері:
Тұрмыстық роботтар
- AVA - тұрмыстық компьютерімен;
- Verro - бассейн тазалау үшін құрылған;
- Roomba және Create, шаңсорғыш функцияларды жүзеге асырады; Әскери және күзет роботы:
- Әскери жүйе SUGV - әскери жағдайында эвакуациялық функциялар мен деректер орындаушы;
- Warrior - жараланған және өрт сөндіру өрт жарылғыш тетіктерін бейтараптандыру үшін арналған жылжытушы;
- су асты аппараты - Seaglider;
- Ranger, су патрульдер жүргізеді;
- мини-аппарат - LANdroids сигналды қабылдау байланыс құрылғыны қолдау үшін Apple.
ABB (Швеция - Швейцария) . Біріктіру арқылы құрылды жетекші робототехника компанияның бірі ASEA және Brown, Boveri&Cie. Бұл күрделілігі әр түрлі деңгейдегі өндірістік роботтар маманданған. Компания Ресейде зауыт құрылысы жүргізілуде, бірінші кезеңі 2015 жылдың ортасына пайдалануға болады.
FANUC Robotics (Жапония) . Өндіруші негізінен өнеркәсіптік роботтар: дәнекерлеу және паллеттеу, кескіндеме, портальдық, дельта роботтар. Біз 1350 кг жүк көтергіштігі ең қуатты робот құрдық және 6 м биіктікке жүктерді көтеру қабілеті бар.

2. 1-сурет KUKA роботы
KUKA (Германия) . 1973 жылы әлемдегі алғашқы өнеркәсіптік робот құрылды. Осы компанияның Роботтар кеңінен автомобиль өнеркәсібінде пайдаланылады. Жай ғана ойын-сауық тарту ретінде пайдаланылады робот Robocoaster құрайды. 100, 000 астам роботтар өндірді.
2. 2-сурет KawasakiRobotics
KawasakiRobotics (Жапония) . Өнеркәсіптік роботтарды өндіруші - агрессивті ортада пайдалану үшін, қауіпті аудандарда, пауков жоғары оқу орындарына арналған роботтарды. Дүние жүзі бойынша, бұл оларды өндіру үшін 120, 000 - нан астам роботтар орнатылған.
Мitsubishi (Жапония) . Пайдаланылған өнеркәсіптік роботтарды жасаумен айналысады:
- мобильдік құрылғылар өндірісінде;
- тиеу және түсіру қабылдау;
- автомобиль өнеркәсібі;
- зертханалық және медициналық жабдықтармен шағын бөлшектерді орнатуда.
LG Electonics (Оңтүстік Корея) . Ол тұрмыстық техника ірі өндірушілерінің бірі LG тобының бір бөлігі болып табылады осындай робот шаңсорғыш үйге арнап өндіреді.
KamanCorporation (АҚШ) Жауынгерлік, әскери және өнеркәсіптік роботтар өндіруге маманданған.
2. 2 Роботты өндірушілер
Ресей Федерациясының мемлекеттік ғылыми орталығы Федералдық мемлекеттік автономиялық ғылыми институтының « Орталық ғылыми-зерттеу және роботты техника мен техникалық техникалық кибернетикалы эксперименттік жобалау институты» - Санкт-Петербург қаласында 1968 жылы құрылған. Негізгі бағыттары - мехатроника, ұялы робот жүйелер, ғарыштық кибернетика, теңіз, әуе және жер үсті роботтар мен экстримальді жұмыс істеу үшін .
ЗАО «Н. Э. Бауман атындағы МГТУ Жоғары деңгейіндегі машина технологиялар орталығы» Мәскеу - өнімдері: жауынгерлік роботтар, барлаушылар, жер жауынгер роботтар, сапқа тұратын роботтар. 2012 жылы таза пайда 1, 95 млн рубльден 5, 35 млн рубльге дейін өсті.
ОАО «НИКИМТ-Атомқұрылыс» - басты «Росатома» материалдық ғылыми ұйымы Мәскеуде орналасқан, мобильді роботтар мен басқару жүйесін шығарады. . 2012 жылы ОАО «НИКИМТ - Атомқұрылыс»-тың таза шығыны 2, 4 есе аз өткен жылдың аналиткалық кезеңіңд 311, 83 млн. руб. -дан 749, 30 млн. руб. өсті.
НИИ ғылыми жүиесі РАН Мәскеу - көлік роботтарды, компьютерлер мен бағдарламалық қамтамасыз ету өндірісі үшін робот жабдық өндіреді.
НПО «Андроидты техника» - бас штабы Мәскеуде орналсқан, 2005 жылы құрылған салыстырмалы жас компания, . Робот андроид, әскери робот- аватарлар өндірумен айналысады, биыл робот-аватарлар тексеріске шығарылатын болады. Бұл ғарыштық барлау қатысуға радио жүйесін SAR-400 пайдаланады. Робот адам өміріне қауіпті жағдайларда қызмет көрсету мен шұғыл жұмыстарды орындауға болады. Жылдық сауда айналымы мен кірістері жұртшылыққа жарияланбайды.

2. 3-сурет SAR-400 роботы
ФГУП ЦНИИ маш Королев қ., негізін салушы «Роскосмос». Команда ғарыш антропоморфты робот SAR-400 институты құрылды. 2015 жылы «Алмасу»жобасы жоспарланған, нәтижесінде айды және басқа планета бетіндегі технологиялық ақпарат алмасу және басқару роботтар құрылатын болды. 2013 жылдың соңында ОАО НПО "ЦНИИМАШ" табысы 1, 7 млрд рубль дейін өсті.

2. 4-сурет Ғарыш антропоморфты робот SAR-400
ОАО «ЦНИИТОЧМАШ» Ростех мемлекеттік корпорациясы, Мәскеу облысы, Климовск. 1944 жылы құрылған. Бұл оператордың бақылауында перспективалық зерттеулер -антропоморфтық жауынгерлік робот қорымен бірлесе отырып, ең перспективалы даярланымдарды бірі. Робот қолын пайдаланып тапанша атып, квадроциклда жүреді. Компания қару-жарақ пен әскери техниканың әуе және жер тасымалдаушылардың робот қадағалау және бұрыштама құрылғыларды қоса алғанда, әскерлерилердің әр түрлі қару-жарағы мен әскери техниканың ең күрделі түрлерін шығарады.
СПКБ ПА Ковров қаласында орналасқан, отбаслық өндіріске "Ваган" мобильді робот- балық жерде жүргіш робот конструкциясын жасады, жеңіл кластағы роботтар - барлаушылар мен саперді жасады. «СКБ ПА» 2012 жылда сатылымнан 82, 19 млн. руб. пайда тапты.
МИРЭА (Радиотехника, электроника және автоматика Маскеу Мемлекеттік Техникалық Университет) - роботты техникалық ауа, жер мен суасты қайықтарында интеллектуалды шаңсорғыш, борттық басқару жүйесі үшін негізделген, интернет ақылдыарқылы қашықтан басқару манипуляция мини роботты жасап шығарды.
«Технологиялар ғылыми-зерттеу институты (ТҒЗИ) Прогресс» Ижевск, ол орыс армиясының соңғы робототехникалық кешен «платформасы-М» дамытуға тиесілі. Қашықтан басқару Бұл бронды робот, гранатомет және пулемет, шолып байқау және қорғау үшін пайдаланылатын қарсыласы, байланыста жоқ күресіп жатыр. Стационарлық және қозғалмалы нысананы жоюға қабілетті. Бірінші өндірістік үлгілер өзінде орыс Қарулы Күштерінің келді.
Ижевск радио зауыты - роботты техникалық жүйелерді мамандандырады, мысалы, роботты техникалық жүйе MRK-002-BG-57, стационарлық жойып және қозғалыстағы нысаналарды, өрт қолдау және барлау роботты техникалық кешен саперлік қамтамасыз етіп, MRK-BT-1 кешені қадағаланады, 1 км қашықтықта басқарылады.
А. Ю. Ишлинский атындағы Механика институты АН Мәскеу - ұялы роботтарды айналысады: бірнеше түрі - қадамдайтын, кез келген көлбеу бетінің бойымен жылжыту үшін - дөңгелекті немесе құбыр ішінде қозғалатын роботтар, миниатюрлі, мобильді, өндірістік роботтар.
НИИ Мәскеуде - қашықтан басқару, бір құтқарушылардың және агрессиялық орталарда жұмыс істеуге саперлік бар, бірегей мульти-робот мини тиегіштің құрылғылы МКСМ 800А-СДУ роботын құрды. Ядердік, биологиялық және химиялық барлау жүргізуде.
-СМП Роботикс компаниясы - Зеленоград қаласы, құрылатын және іске қосылды патруль робот - «Трал Патруль 3. 1»жасады. Ол үлкен аудандары қорғайды және онда қозғалатын заттарды анықтайды.
2. 3 Роботехника зерттеу түрлері
Жаһандық роботты техника рынокты зерттеуге Бостон зерттеу компаниясы (BSG) 2025 жылға дейінгі кезеңге болжайды. Орташа жылдық өсу қарқыны 10, 4%. Бірінші кезекте, оның ішіне:
- жеке роботтардың сегментінде 15, 8% жылдық өсу тәртібі - оқыту мен тәрбиелеу үшін роботтар, ойын-сауық, қауіпсіздік, тазалау және басқа да тұрмыстық мақсаттар. Сату көлемі 9 млрд. ақш долларына дейін өседі. 2025 жылға қарай . 1 млрд. доллар. 2010 жыл.
- жылдық өсімі 11, 8% медициналық және хирургиялық мақсаттарға, ауыл шаруашылығы және құрылыс үшін роботтарды сату тәртібі. Сату 17 млрд доллорға дейін өседі. 2025 жылы 3. 2 млрд. доллар. 2010 жылы.
- өндіріске роботтарды сату 10, 1% жылдық өсу тапсырыс - дәнекерлеу, құрастыру, бояу, тиеу - түсіру және басқа да жұмыстар. Сату 24, 4 млрд. ақш долларына дейін өседі. 2025 жылы 5, 8 млрд. доллар. 2010 жылы. Осылайша, робототехника бұл сегмент, төменгі өсу қарқыны қарамастан, робототехника ірі нарықтық үлесін сақтайды.
- әскери мақсаттарда роботтарды сату тәртібі 8, 1% жылдық өсім - ең алдымен ұшқышсыз ұшу аппараттарының түрлері, әскери exoskeletons, су асты көлік құралдары, сондай-ақ жер бетіндегі көлік құралдары. 2025 жылы сату 16, 5 млрд. ақш долларына дейін өседі.
Мұның барлығы өз кезегінде оларды пайдалану ауқымын кеңейту әкеледі өз жұмысының, олардың өнімділігі мен кешенділігін арттыру роботтар мен компоненттерін бағаның құлдырауы аясында өтеді.
... жалғасыСіз бұл жұмысты біздің қосымшамыз арқылы толығымен тегін көре аласыз.
- Іс жүргізу
- Автоматтандыру, Техника
- Алғашқы әскери дайындық
- Астрономия
- Ауыл шаруашылығы
- Банк ісі
- Бизнесті бағалау
- Биология
- Бухгалтерлік іс
- Валеология
- Ветеринария
- География
- Геология, Геофизика, Геодезия
- Дін
- Ет, сүт, шарап өнімдері
- Жалпы тарих
- Жер кадастрі, Жылжымайтын мүлік
- Журналистика
- Информатика
- Кеден ісі
- Маркетинг
- Математика, Геометрия
- Медицина
- Мемлекеттік басқару
- Менеджмент
- Мұнай, Газ
- Мұрағат ісі
- Мәдениеттану
- ОБЖ (Основы безопасности жизнедеятельности)
- Педагогика
- Полиграфия
- Психология
- Салық
- Саясаттану
- Сақтандыру
- Сертификаттау, стандарттау
- Социология, Демография
- Спорт
- Статистика
- Тілтану, Филология
- Тарихи тұлғалар
- Тау-кен ісі
- Транспорт
- Туризм
- Физика
- Философия
- Халықаралық қатынастар
- Химия
- Экология, Қоршаған ортаны қорғау
- Экономика
- Экономикалық география
- Электротехника
- Қазақстан тарихы
- Қаржы
- Құрылыс
- Құқық, Криминалистика
- Әдебиет
- Өнер, музыка
- Өнеркәсіп, Өндіріс
Қазақ тілінде жазылған рефераттар, курстық жұмыстар, дипломдық жұмыстар бойынша біздің қор #1 болып табылады.

Ақпарат
Қосымша
Email: info@stud.kz