Көпірлік крандардың электр жетегі мен механикалық бөлімдерінің құрылымы, есептеулері және басқару жүйелерін таңдау

1. Көпірлік крандардың электр жетегінің механикалық бөлімдері
1. 1. Технологиялық процесс
Көпірлі крандардың көпірлерін дайындаудың технологиялық процесі басты және соңғы арқалықтарды құрастырудан және біріктіруден, тірек рельстерін, таяныштарды және тұтқаларды орнатудан және бекітуден тұрады.
Жалпы мақсаттағы крандарда шеткі арқалықтар құрастыруға оларда орнатылған жүріс дөңгелектерімен бірге беріледі. Теңгергіш жүйесі бар крандардың жанында тек көпірдің металл конструкциясы жиналады, ал теңгергіштер кранды жалпы технологиялық құрастыру кезінде көпірдің астына жүргізіледі.
Көпір крандарын ағынды өндіру кезінде көпірдің басты және соңғы арқалықтарын стапельде жинайды, бұл жұмысшылардың еңбек өнімділігін 2, 5-3 есе арттыруға және айына 110- 120 кранға дейін шығаруға, сондай-ақ көпірлерді құрастырудың дәлдігін арттыруға мүмкіндік береді.

Сурет - 1. Көпірлік кранның құрылысы
Басты арқалықтардың шеткі, қажетті реттеу және түзету қосылуының дұрыстығын тексергеннен кейін ұстап алу, содан кейін и жүргізіледі. Арқалықтарды қосу торабының конструкциясына сәйкес күшейткіш орамалдар мен қабырға орнатылады.
Стапельден көпір кранмен алынады, жинау алаңының бойлық арбашаларына беріледі, онда оған Кранның қозғалу механизмі орнатылады.
Дайындау процесінде шеткі арқалықтар 12 технологиялық бұрандамалармен монтаждау жіктері бойынша жалғанады. Құрастырғаннан кейін көпір таңбаланады және монтаждық түйіспелер ажыратылады. Нәтижесінде екі жартылай Бекет алынады, олар көлік арбаларымен бояу және кептіру цехына, ал одан дайын өнім қоймасына тасымалданады.
1. 2 Көпірлік крандардың құрылымдық ерекшеліктері
Көпірлік кранның ерекшелігі көпірдің болуы болып табылады (1), осы жылжымалы, аралық конструкция бойынша жүк арбасы қозғалады (2), Кранның өзі сақиналы арқалықтарға тіреледі (3), олардың көмегімен кран рельстермен қозғалады (4), көтеру және басқару Жүк кабинасының көмегімен жүзеге асырылады (5) .
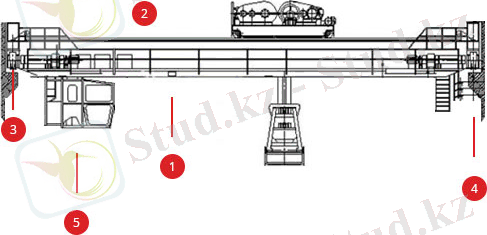
Сурет - 2. Көпірлік кранның сұлбасы
Көпірлік крандардың құрылғысы басып алу құрылғысына ілінген жүктерді де, сондай-ақ арнайы рельстерде барлық конструкцияны да жылжытуға мүмкіндік береді. Бұл барлық бөлмемен жұмыс істеуге және барлық бағыттарда қозғалуға мүмкіндік береді.
Конструктивті, көпірлі крандар көпірді тіректерге бекіту тәсілімен ерекшеленеді. Олар аспалы және тірек болуы мүмкін. Аспалы көпірлі крандар аралық құрылыстың конструкциясы шағын қысылған Үй-жайлар жағдайында үлкен маневр жасауды қамтамасыз ете отырып, төменгі тірекке бекітіледі. Тіреуіш арқалықтардың сенімді бекітілуі есебінен, тұрақты және берік болып табылады, бірақ жұмыс үшін үлкен кеңістікті талап етеді.

Сурет - 3. Көпірлік крандар тіректерді бекітуге арналған орын
Аралық арқалықтардың саны бойынша көпірлі крандар бір Арқалыққа және екі Арқалыққа бөлінеді. Атаудан бір белдік крандардың бір көпірі бар, ол бойынша жүк тасымалдағыш, ал екі белдік - екі көпір бар, екі жүк арбасын пайдалануға мүмкіндік береді, бұл жұмыс тиімділігін едәуір арттырады.
Әдетте қарапайым басып алу құрылғыларымен жабдықталған жалпы мақсаттағы крандардан басқа, әртүрлі жүк тасушылар бар арнайы мақсаттағы құрылымдар бар: грейферлер, магнитті шайбалар, айналмалы арбалар, кенелер және басқалар. Оларды арнайы жүкпен жұмыс істеуге арналған жабдыққа орнатады.
Жүк қармаушы құрылғының түріне байланысты көпір крандары грейферлік, контейнерлік, магнитті, траверс және басқалары болуы мүмкін.
1. 3. Көтергіш крандардың механикалық жабдықтарын есептеу және таңдау
1. 3. 1. Дөңгелектерге түсетін статиканың жүктемесін анықтау.
Номинал салмағы мынаған тең:
 кН (1)
кН (1)
Арбашаның салмағы:
 кН (2)
кН (2)
Жүктеменің әркелкі коэффициентін ескере отырып 1-ші дөңгелекке түсетін максимал статикалық жүктеме:
 кН (3)
кН (3)
Дөңгелекке түсетін минимал статикалық жүктеме:
 кН (4)
кН (4)
Жоғарғы берілістер үшін D=400мм=0, 4м дөңгелектен таңдалды.
1. 3. 2. Дөңгелек қондырғыларын таңдау.
Дөңгелек қондырғыларын таңдау [1] -дегі 8-ші қосымша бойынша дөңгелек диаметріне сәйкес таңдалады. К2РП-400 типті дөңгелектің қондырғысын таңдаймыз. Бұл жетекке арналған құрылғы. Жетексіз КРП-400 типті дөңгелек қондырғысының негізгі параметрі мынадай:
 ;
;





Сақтандыру беткейінің формасы цилиндрлік, подшибниктердің түрі роликті, радиалды, сфералы, симметриалы.
1. 3. 3. Арбаша рельсін таңдау.
[1] дегі 2, 20 кесте бойынша жүргізіледі. Ол бойынша КР-70 ГОСТ 4121-76 типті рельс таңдалды. Техникалық берілістер:
R=400мм головка радиусы;
B=80мм головка ені;
1. 3. 4. Арбашаның жылжуына кедергіні анықтау.
Үйкеліс күшін анықтаймыз:
 кН (5)
кН (5)
мұндағы μ = 0, 6 ( 2. 13 - кесте [1] ) ; f = 0, 015 ( 2. 14 - кесте [1] ) ;
 (2. 15- кесте [1] ) .
(2. 15- кесте [1] ) .
Арбашаның жүру жолындағы еңістігінен (уклон) болатын кедергі:
 кН (6)
кН (6)
мұндағы ά=0. 002 еңістік бұрышы.
Жылдамдық алу кезіндегі инерция күштерін туғызатын кедергі:
 кН (7)
кН (7)
мұндағы
 , [1] -дегі 1, 1 қосымшадан; δ=1, 25- жылдамдық 1 м/с-тан аз болғанда.
, [1] -дегі 1, 1 қосымшадан; δ=1, 25- жылдамдық 1 м/с-тан аз болғанда.
Иілгіш аспа қолданған кезде жүктің шайқалуынан болатын кедергі:
 кН (8)
кН (8)
Көтергіш кран жабық жерде болғандықтан желден болатын кедергі:
МЕСТ 1451-76 бойынша F в = 0 деп аламыз.
Толық кедергі:
 кН (9)
кН (9)
1. 4 Қозғалтқыш білігіне келтірілген ілгерілмелі қозғалтқышты және жүйенің қатаңдық коэффициентін есептеу.
Тежеу шкивінің инерция моменті:
 кг м
2
(10)
кг м
2
(10)
мұндағы
 - салмақтану бөлігін есепке алу коэффициенті.
- салмақтану бөлігін есепке алу коэффициенті.
Тез жүрістегі біліктегі барлық айналушы біліктердің инерция моменті мынаған тең:
 кг м
2
(11)
кг м
2
(11)
Айналу инерция моменті:
кг м 2 (12)
мұндағы
 .
.
Әрдайым қозғалтқыштағы бөліктердің салмақтарының қосындысы:
кг (13)
Жүкпен жылдамдық алған кездегі механизімінің әрдайым қозғалыстағы бөліктерінің инерция моменті мынаған тең:
 кг м
2
(14)
кг м
2
(14)
 кг м
2
(15)
кг м
2
(15)
Қозғалтқыш білігіне келтірілген жүгі бар арбашаның инерция моменті:
 кг м
2
(16)
кг м
2
(16)
Жүксіз арбашаның қозғалтқыш білігіне келтірілген инерция моменті:
 кг м
2
(17)
кг м
2
(17)
Қозғалтқышта жүгі бар арбашаның статикалық кедергі күші:
 кН (18)
кН (18)
Қозғалтқыштағы жүгі жоқ арбашаның статикалық кедергі күші:
 кН (19)
кН (19)
 кН (20)
кН (20)
 кН (21)
кН (21)
Арбашаның жүкпен жылдамдық алған кездегі статикалық кедергі моменті:
 Нм (22)
Нм (22)
Арбашаның жүксіз жылдамдық алған кездегі статикалық кедергі моменті:
 Нм (23)
Нм (23)
Жүгі бар арбашаның номиналды жылдамдық алу моменті:
 с. (24)
с. (24)
Жүгі жоқ арбашаның номиналды жылдамдық алу моменті:
 с. (25)
с. (25)
Берілген мәндер 3с-тан аспайды былайша айтқанда қозғалтқыш жылдамдық алудың керекті интенсивтілігін қамтамасыз етеді.
Жүкпен жылдамдық алған кездегі орташа үдеу:
 м/с
2
(26)
м/с
2
(26)
Жүкпен және жүксіз жылдамдық алу кезінде және тежеу кезіндегі ілгерілемелі қозғалтқыштағы бөлшектердің инерция моменті:
 кгм
2
(27)
кгм
2
(27)
 кгм
2
(28)
кгм
2
(28)
Жүкпен және жүксіз тежеу кезіндегі арбашаның қозғалтқыш білігіне келтірілетін моменттер:
 кгм
2
(29)
кгм
2
(29)
 кгм
2
(30)
кгм
2
(30)
Тежеу және жылдамдық алуі кезіндегі статикалық кедергілер моменттері тең деп қабылдаймыз:
 Нм (31)
Нм (31)
 Нм (32)
Нм (32)
Тежеу қозғалтқыштың рекуперативтік режимге өту кезіндегі жүретінін ескеріп:
 Нм (33)
Нм (33)
Арбашаның жүкпен және жүксіз тежелу уақытын есептейміз:
 с. (34)
с. (34)
 с. (35)
с. (35)
Арбаның механикалық тежегіш көмегімен тежеу жағдайында оны берілген
М
 =825
Нм
тежеу моментіне сәйкестеп қою керек.
=825
Нм
тежеу моментіне сәйкестеп қою керек.
Арбашаның жүкпен жылдамдық алу кезіндегі жүретін жолы:
 м (36)
м (36)
Арбашаның жүксіз жылдамдық алу кезіндегі жүретін жолы:
 м (37)
м (37)
Арбашаның жүкпен және жүксіз толық тежеу кезіндегі жүретін жолы:
 м (38)
м (38)
 м (39)
м (39)
Арбашаның тұрақталған режимдегі жүкпен және жүксәз жүретін жолы:
 м (40)
м (40)
 м (41)
м (41)
Жүкпен және жүксіз тұрақталған режим уақыты:
 с. (42)
с. (42)
 с. (43)
с. (43)
Арбаша жұмысының есептік циклы:
- 1=L/2=30м қашықтыққа жүкпен және жүксз қозғалыс;
- 1сағат ішінде циклдар саны: N=75;
- 1 цикл уақыты:
 с. (44)
с. (44)
Негізгі циклдегі іргелестер уақыты:
 с. (45)
с. (45)
Онда қозғалтқыштың салыстырмалы есептік ПВ-сы мынаған тең:
 (46)
(46)
2. Көпірлік кран басқар объектісі ретінде
2. 1 Электр жетек жүйесін шолу
Өндірістік процестерді кешенді механикаландыру мен автоматтандыруды жүзеге асыруда, қолмен тиеу-түсіру жұмыстарын жоюда маңызды рөл көтеру-көліктік машина жасауға жатады. Тиеу жұмыстары кезінде ауыр еңбекті айтарлықтай қысқарту ең алдымен Жүк қармаушы операцияларды автоматтандыру, жүктерді дәл орнату, сондай-ақ жүк көтергіш машиналарды басқару процестерін автоматтандыру жолымен жүзеге асырылады. Бұл есептер электржетектің көмегімен шешілетіндіктен, қазіргі заманғы электржетектерді жетілдіру және енгізу мәні үнемі өсуде.
Қазіргі уақытта кранды электр жетегінде реттеудің толық тиристорлы жүйелері де, сондай-ақ әртүрлі басқарылмайтын және басқарылатын жартылай өткізгішті түзеткіштер де, жекелеген күштік жартылай өткізгішті аспаптар де кеңінен қолданылады, бұл салыстырмалы төмен шығындар кезінде механизмдердің қозғалу жылдамдығын айтарлықтай реттейтін жүйелерді алуға мүмкіндік береді. Пайдалану персоналын қысқарту үшін жүк көтергіш машиналарды, атап айтқанда крандарды, радиоарна бойынша (қашықтықтан) басқару жүйелерін қолданады. Бұл жүйелерде максималды эдеккт жылдамдықты тұрақты реттеуді қамтамасыз ету кезінде де қол жеткізіледі.
Негізгі назар механизмдер мен электр жабдықтарын жүктеудің енгізілген жаңа сыныптамасын ескере отырып, крандар үшін электр жабдықтарын таңдаудың жаңа әдістеріне, сондай-ақ радиоарна бойынша басқаруды қоса алғанда, басқарудың жаңа жүйелеріне және жылдамдықты реттеудің әртүрлі жүйелеріне бөлінеді.
Көпірлі крандарды көтеру механизмдері белсенді жүктемемен циклдық әсер ету механизмдеріне жатады. Жалпы жағдайда осы механизмдердің жұмыс циклі технологиялық үдеріспен анықталады, бірақ жетекті қозғалтқыштарды таңдауға динамикалық режимдер елеулі әсер етеді: іске қосу, реверс, тежеу.
Жүк көтергіш крандардың көпшілігі жүктерді қайта өңдеу кезінде пайдаланудың тұрақты өзгермелі жағдайларымен сипатталады, сондықтан өз құрамында электр жетектері бар крандардың механизмдері, салмағы, өлшемі, пішіні бойынша және өндірістік үй-жайлар жағдайында немесе ашық жүк алаңдарында әртүрлі жүктермен тұрақты түр өзгеретін жұмысқа барынша бейімделген болуы тиіс.
Кранды электр жетегінің кез келген дерлік жүктемелерінің өзгеруінің өте кең диапазоны жетекті Электр қозғалтқыштарының, басқару және қорғау аппаратурасының есептік параметрлерін таңдаудың ерекше тәсілін талап ететін басты факторлардың бірі болып табылады. Ықтимал нұсқаларды анықтау және электржетектің рационалды жүйесін таңдау 20:1-ден астам жылдамдықты реттеу диапазоны бар реттелетін крандық электр жетектері үшін мынадай электр жетегінің жүйелері барынша қолданылады:
1. Тиристорлы түрлендіргіш кернеу жүйесі (ТП-Д) ;
2. Тиристорлы реттеуші кернеу жүйесі (ТРН-АД) ;
3. Түрлендіргіш жиілік жүйесі (ПЧ-АД) ;
4. Асинхронды қозғалтқышы және торапқа сырғу энергиясын рекуперациялаусыз түзетілген ток тізбегіндегі импульстік реттеуіші бар жүйе (АД-ИР-И жүйесі) .
Бұл жұмыста крандық электржетектің аталған жүйелерінің энергетикалық және экономикалық көрсеткіштеріне салыстырмалы талдау жасалған, технологиялық циклдің механикалық жұмысының бірлігін орындау кезінде электр энергиясын аз тұтынатын электр жетегінің жүйесі неғұрлым тиімді болып саналады.
Кранның жұмыс циклына Жүкті көтеру, оны қажетті қашықтыққа ауыстыру, жүкті түсіру және ілмектеу үшін үзіліс кезеңдері кіреді. ПВ=40% қосудың стандартты ұзақтығы берілген, сонымен қатар жұмыс циклында жылдамдығы төмен қозғалыс учаскелері бар.
Электржетек жүйесін қолданудың тиімді шекарасын анықтау кезінде салыстырмалы жүйелердің энергетикалық көрсеткіштерін ғана емес, сонымен қатар жылдық келтірілген шығындарды да бағалау қажет.
2. 2 Электр қозғалтқышты таңдау
Жиілік түрлендіргіштері синхронды электр қозғалтқыштарымен бірге сақиналы торлы ротормен қолданылады. Көп жағдайда крандарды әзірлеушілер немесе дайындаушылар кранды электр жетегін жаңғыртып, жиіліктік-реттелетін электр жетегі үшін арнайы орындалатын роторлары бар, жоғары кедергінің қорытпасымен құйылған кран сериясының дәстүрлі электр қозғалтқыштарын қолданады. Бұл, бірінші кезекте, жиі іске қосу процесінде жоғары сәтті қамтамасыз ету талаптарымен түсіндіріледі. Қанағаттанарлық жылу режимін құру үшін іске қосу токтарының еселігін төмендету бойынша арнайы шаралар қабылданады, белсенді материалдардың шығыны артады. Осының бәрі қозғалтқыштың салмағы мен құнының өсуіне әкеледі. Бұл статор орамаларының уақытынан бұрын істен шығуына, ротор өзекшелерінің балқуына, басты көтергіштің электр жетегінде қолданылатын мойынтіректер мен жағдай датчиктерінің бұзылуына әкеп соқтырады. Басқару жүйесі көп қуатты жиілік түрлендіргіштерін және үлкен габаритті қозғалтқыштарды қолдану қажеттігінен ұтымсыз болып шығады. Электр жетегі үшін арнайы қозғалтқыштарды қолдану қажет екені анық.
Электр жетегі үшін кранды көтеру механизмінің электр жетегі үшін МТН 512-6 типті крандық серияның қысқа тұйықталған роторы бар асинхронды электрқозғалтқышты таңдаймыз.
Қуаты
P 2 , кВт
Айналу жиілігі
n н , об/мин
ПӘК
Ŋ н , %

Сурет - 4. МТН 512-6 қозғалтқышының сыртқы бейнесі
Сурет - 5. Асинхронды қозғалтқыштың құрылымдық сұлбасы
2. 3 Жиілік түрлендіргішін таңдау
Крандық жиіліктік-реттелетін электр жетегі үшін жүк көтергіш крандарда қолдануға арнайы бейімделген және қажетті функционалдық мүмкіндіктері бар жиілік түрлендіргіштері талап етіледі:
- тежегішті басқару функциясы қозғалтқыш қажетті сәтке жеткен кезде тежегішті ашуға сигнал беру үшін және жылдамдықты ең төменгі деңгейге дейін төмендету кезінде тежегішті салуға сигнал беру үшін арналған. Тежегішті түзету үшін салмақты өлшеу функциясы пайдаланылуы мүмкін.
- жоғары жылдамдықпен көтеру функциясы. Көтерудің ең жоғарғы жылдамдығы жүк салмағына байланысты автоматты түрде анықталады.
- қозғалтқышты және генераторлық режимдерде қажетті механикалық сипаттаманы қалыптастырумен электр қозғалтқышының моментін шектеу функциясы.
- жылдамдық пен тежелудің берілген қарқынын қалыптастыру функциясы.
Тежегіш резисторы немесе қалпына келтіру қондырғысы арқылы мотор тежеу функциясы. Қалпына келтіру модульдерін енгізудің экономикалық әсері артады: электр қозғалтқыштарының қуатын арттыру, инерциалды тетіктерді күрт тежеу, сондай-ақ жүктемені (лифттер, шахта көтергіштері) тереңдету. 100 А дейін ток тұтыну жүйелерінің төмен қалпына келетіндігі туралы, сондай-ақ қалпына келтіру модульдерінің салыстырмалы түрде жоғары құны мен іске асырудың күрделілігі туралы пікірді ескере отырып, тежеуіш резисторды пайдалану туралы шешім қабылданды.
Жиілік түрлендіргішінің параметрлері
Жоғарыда аталған талаптарды ескере отырып, ALTIVAR 71HD75N4 жиілік түрлендіргішін таңдаймыз
Жиілік түрлендіргішінің параметрлері кестеде келтірілген
Тип
Параметры
питающей сети
Выходная
частота
Выходной ток
AITIVAR 71HD75N4
U 1л , В
f c , Гц
f и , Гц
I ин , А
I ин макс , А (60 с)
380-480
50/60
0-120
167
250. 5

Сурет - 6. Altivar 71 жиіліг түрлендіргіш
Altivar 71 жиілік түрлендіргіштері әртүрлі заңдар бар қозғалтқышты басқару және көптеген функционалдық мүмкіндіктер ең қатаң қолдану талаптарына жауап береді.
Ерекшелік ерекшеліктері:
- Кірістірілген басқару алгоритмдері: U/f-реттеу, тұйықталған және тұйықталған жүйедегі векторлық басқару
- Өте төмен жылдамдықпен жұмыс істеу кезінде жоғары дәлдік және жақсартылған динамикалық сипаттамалар
- Қуатты бейімдеу жүйесі (Energy Adaptation System-ENA)
- Жоғары жылдамдықты қозғалтқыштар үшін кеңейтілген Шығыс диапазоны
2. 4. Басқару жүйелерінің жіктелуі
БЖ жобалау кезінде шешілетін негізгі міндеттердің бірі адам мен техника арасында функцияларды оңтайлы бөлу міндеті болып табылады. Объектіні немесе технологиялық процестің барысын басқару адамның қатысуынсыз жүзеге асырылатын жүйелер автоматты деп аталады. Бірақ басқарудың нақты заңдары белгісіз болған кезде адам басқаруды (басқару сигналдарын анықтау) өзіне алуға мәжбүр. Мұндай жүйелер автоматтандырылған деп аталады. Яғни басқару функциясының бір бөлігін адам орындайды, ал бір бөлігін - тиісті механизмдер мен құрылғылар орындайды. Егер басқару толығымен адам орындалса, бұл басқару Қолмен деп аталады.
Автоматтандыру деңгейі бойынша АБЖ келесі түрлерге бөлінеді:
а) Автоматты емес (қолмен) басқару жүйелері - Бақылау мен басқарудың барлық функцияларын адамдар орындайтын АЖ (ЭЕМ және диспетчерлендіру құралдарынсыз) . Технологиялық жабдықты басқаруға дайындау процесінде технолог операцияларды орындау дәйектілігін әзірлейді, олардың параметрлері мен сипаттамаларын, операциялардың ұзақтығын анықтайды және технологиялық картаға жазады. Мәні бойынша технология басқару алгоритмі болып табылады. Оператор технологиялық жабдықты әзірленген технологияға сәйкес қолмен басқарады. Т. е. ол сигналдар арқылы технологиялық жабдықты басқару тізбегін құрайды. Басқару командаларының нақты орындалуын оператор белгілейді, сол арқылы кері байланыс тізбегін құрады.
1. 1 суретте. оператор жүзеге асыратын объектіні (технологиялық жабдықты) автоматты емес басқару схемасы ұсынылған.
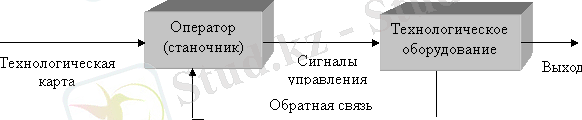
Сурет - 7. Автоматты емес (қолмен) басқару
Қолмен басқару кезінде әрбір жаңадан пайда болған операцияны орындау үшін жаңа жұмысшыларды тарту, жаңа өнімді игеруге едәуір уақыт жұмсау талап етіледі.
б) автоматты басқару жүйелері - АЖ, онда автоматтандыру құралдары мен есептеу техникасы (ЕТ) қолданылатын, келіп түскен ақпаратты оператор қажетті шешім қабылдауға ыңғайлы түрге дайындайтын. Автоматты басқарылатын жүйелерде оператор технологиялық процеске қатыспайды. Технологиялық жабдықтың жай-күйі бірқатар Шығыс шамаларымен сипатталады. Басқару бағдарламасының және сыртқы қоздырғыш әсерлердің әсерінен басқару объектісінің жай-күйі өзгереді, келісу пайда болады. Келісуді жою үшін басқару жүйесінен келіп түсетін басқару әсері өңделеді.
Автоматты басқару жүйелері ашық және тұйық контур бойынша салынуы мүмкін. Бірінші жағдайда басқарушы құрылғы бір байланыс арнасымен технологиялық жабдықпен байланысты. Басқару бағдарламасының командалары енгізу құрылғысы (УВ) арқылы Технологиялық жабдыққа әсер ететін жетекті басқару блогына (БУП) түседі. Бұл ретте ақпарат ағыны бір бағытта ғана қозғалады. Мысал ретінде Технологиялық жабдықты берудің қадамдық жетегі бар басқару жүйелері қызмет ете алады.
Ең көп таралымды тұйықталған контур бойынша салынған, яғни басқару сигналдарын беру арнасы және кері байланыс арнасы бар автоматты басқару жүйелері алды (сурет. 1. 2) .
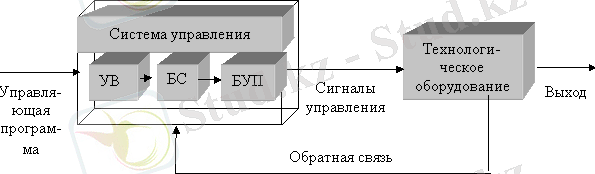
Сурет - 8. Автоматты басқару
Кері байланыс арнасы қазіргі уақытта салыстыру блогында (БС) бақыланатын шаманың жай-күйі туралы ақпаратты көтереді. Егер бақыланатын шаманың жай-күйі талап етілетін мәнге сәйкес келмесе (келісу пайда болады), жетекті басқару блогына басқарушы әсер қалыптасады. Қажетті түзету жүргізіледі. Бақылау объектісі технологиялық жабдықтың жай-күйі, кесетін құралдың жағдайы, өңделетін бөлшектердің өлшемдері және т. б. болуы мүмкін.
2) басқару әдісі бойынша
СУ басқару әдісі бойынша екі үлкен сыныпқа бөлінеді:
а) кәдімгі (өздігінен түзілмейтін) СУ. Бұл жүйелер басқару процесінде өз құрылымын өзгертпейтін қарапайым разрядқа жатады. Олар құю және термиялық цехтарда кеңінен қолданылады. Қарапайым СУ үш ішкі сыныпқа бөлінеді: тұйықталған, тұйықталған және аралас басқару жүйелері.
б) өздігінен құрылатын (бейімделген) СУ. Бұл жүйелерде реттеу объектісінің сыртқы шарттары немесе сипаттамалары өзгерген кезде басқару құрылғысының параметрлерінің автоматты түрде (алдын ала берілмеген) өзгеруі АЖ құрылымын өзгерту немесе тіпті жаңа элементтерді енгізу есебінен болады.
Басқару объектісінің сыртқы шарттары немесе сипаттамалары өзгерген кезде өздігінен құрылатын жүйелерде басқару құрылғысының параметрлерін немесе оның элементтерінің құрылымын автоматты түрде (алдын ала берілмеген бағдарлама бойынша) өзгерту жүргізіледі. Осылайша, жүйенің тұрақты жұмысы және берілген оңтайлы деңгейде реттелетін шаманы қолдау қамтамасыз етіледі.
Адаптивті жүйелер объектінің сыртқы жағдайлары мен сипаттамаларының барлық өзгерістеріне бейімделіп қана қоймай, сонымен қатар бұзылған элементтердің орнына жаңа тізбектер жасай отырып, жекелеген элементтердің ақаулары немесе істен шығуы болған жағдайда да қалыпты жұмыс істеуі тиіс. Құрылымның өзін-өзі қалыптастыруы бар жүйелер бірнеше нұсқаларды жылдам сынау, олардың ішіндегі ең жақсысын іріктеу және "есте сақтау" жолымен өзін-өзі жетілдіруге, "тәжірибе алуға" мәжбүрлеуге болады.
3) иерархиялық қағидат бойынша
Иерархиялық деңгейлердің санына және басқару функцияларын осы деңгейлер бойынша бөлуге байланысты СК бір деңгейлі және көп деңгейлі болып бөлінеді.
Бір ғана басқару деңгейі бар басқару жүйелері бір деңгейлі деп аталды. Мұндай жүйелердің мысалы-көшіру басқару жүйесі. Копир профилі атқарушы органның қозғалысын анықтайды.
Көп деңгейлі жүйелер бірнеше басқару деңгейлері бар, олардың әрқайсысы нақты функцияларды орындайды.
4) функционалдық белгісі бойынша барлық басқару жүйелері төрт сыныпқа бөлінеді:
а) механизмдердің жұмысын үйлестіруге арналған жүйелер;
б) технологиялық процестердің параметрлерін реттеу жүйесі;
в) автоматты бақылау жүйелері;
г) автоматты қорғау және бұғаттау жүйелері.
Жабдықтың немесе Жабдықтың жекелеген механизмдері мен тораптарын үйлестіруге арналған жүйелер автоматты басқару жүйелері (АБЖ) болып табылады. АБЖ объектіні (объектілер тобын) автоматты басқаруды қамтамасыз етеді.
... жалғасыСіз бұл жұмысты біздің қосымшамыз арқылы толығымен тегін көре аласыз.
- Іс жүргізу
- Автоматтандыру, Техника
- Алғашқы әскери дайындық
- Астрономия
- Ауыл шаруашылығы
- Банк ісі
- Бизнесті бағалау
- Биология
- Бухгалтерлік іс
- Валеология
- Ветеринария
- География
- Геология, Геофизика, Геодезия
- Дін
- Ет, сүт, шарап өнімдері
- Жалпы тарих
- Жер кадастрі, Жылжымайтын мүлік
- Журналистика
- Информатика
- Кеден ісі
- Маркетинг
- Математика, Геометрия
- Медицина
- Мемлекеттік басқару
- Менеджмент
- Мұнай, Газ
- Мұрағат ісі
- Мәдениеттану
- ОБЖ (Основы безопасности жизнедеятельности)
- Педагогика
- Полиграфия
- Психология
- Салық
- Саясаттану
- Сақтандыру
- Сертификаттау, стандарттау
- Социология, Демография
- Спорт
- Статистика
- Тілтану, Филология
- Тарихи тұлғалар
- Тау-кен ісі
- Транспорт
- Туризм
- Физика
- Философия
- Халықаралық қатынастар
- Химия
- Экология, Қоршаған ортаны қорғау
- Экономика
- Экономикалық география
- Электротехника
- Қазақстан тарихы
- Қаржы
- Құрылыс
- Құқық, Криминалистика
- Әдебиет
- Өнер, музыка
- Өнеркәсіп, Өндіріс
Қазақ тілінде жазылған рефераттар, курстық жұмыстар, дипломдық жұмыстар бойынша біздің қор #1 болып табылады.

Ақпарат
Қосымша
Email: info@stud.kz