Автоматты басқару жүйелеріндегі автоматтандыру мен ақпараттандыру алгоритмдерін жобалау және өтпелі процестер мен импульсті өтпелі функциялардың сапа көрсеткіштерін зерттеу

МАЗМҰНЫ
КІРІСПЕ 3
1. НЕГІЗГІ БӨЛІМ 4
1. 1 Автоматты басқару жүйесіндегі автоматтандыру және ақпараттандыру алгоритмдерін жасау және зерттеу 4-92. АРНАЙЫ БӨЛІМ 10
2. 1 Автоматты реттеу жүйесінің өтпелі процесін тұрғызу және
жүйенің сапа көрсеткіштерін анықтау. 10-13
2. 2 Автоматты басқару жүйесіндегі функциялар 14-17
2. 3 Импульсті өтпелі функцияны анықтау 18-20
ГЛОСАРИЙ 21
ҚОРЫТЫНДЫ 22
ҚОЛДАНЫЛҒАН ӘДЕБИЕТТЕР ТІЗІМІ 23
КІРІСПЕ
Басқару деп қандай да бір процесті жүзеге асыруға бағытталған әсерлердің жиынтығын немесе нақты бір мақсатқа жету процестерінің тобын айтамыз.
Басқару техникалық жүйелер мен тірі организмдерге және әлеуметтік жүйелер
(экономикалық, әкімшілік, әскери) үшін қажет. Мұнда техникалық жүйелерді
басқару қарастырылады. Автоматты басқару деп тікелей адамның қатысуынсыз, автоматты түрде жүзеге асырылатын басқаруды айтамыз.
Автоматты басқару жүйесі деп қандай да бір процесті жүзеге асыруға
арналған құрылғылардың жиынтығын немесе тікелей адамның қатысуынсыз
орындалатын процестер тобын айтамыз. Мұндай жүйелерде адам тек қана алдыңғы қосу импульсін бере алады. Көп жағдайларда осы бастапқы импульс-
тің өзі де автомат құрылғыларымен беріледі.
Жүйе элементерінің динамикалық қасиеттері жөнінде кіріске әр түрлі әсер-
лерді беру кезіндегі шығыс шаманың уақыт бойынша өзгеруіне байланысты
талдауға болады. Көбінесе кіріс ретінде бірлік сатылы әсерді беру кезіндегі
шығыс шаманың уақыт бойынша өзгерісі өтпелі функция деп аталады. Өтпелі
функция өтпелі процесті бейнелейтін дифференциалды теңдеулерді шешу
нәтижесінде алынады. Өтпелі функцияның графикалық түрдегі бейнесі өтпелі сипаттамадеп аталады. Басқарылатын объектілер үшін өтпелі сипаттаманы көбінесе екпін қисығы деп атауға ыңғайлы. Импульсті өтпелі функция немесе
салмақ функциясы деп кірісіне бірлік импульсті әсерді беру кезіндегі шығыс
шаманың уақыт бойынша өзгерісін айтамыз. Бұл кезде импульстің ұзақтығы жүйе элементіндегі өтпелі процестің уақытына қарағанда бірнеше ретке аз болуы қажет. Импульстің бар болуы ішінде жүйе элементтерінің реакциясы іс жүзінде тұрақты болып қалады, яғни шығыс шама өзгеріске душар болмайды.
Өтпелі функция мен салмақ функция арасында байланыс бар, соның ішінде
салмақ функциясы өтпелі функциясының туындысы болып табылады.
Өтпелі сипаттамалардың (өтпелі функцияның) түрлеріне байланысты басқару объектілері төзімді немесе статикалық, нейтралды (бейтарап) немесе астатикалық және төзімсіз болып бөлінеді.
1. НЕГІЗГІ БӨЛІМ
1. 1 Автоматты басқару жүйесіндегі автоматтандыру және ақпараттандыру алгоритмдерін жасау және зерттеуТехнологиялық процестің басқару жүйесін жобалаудың басты этаптарының бірі оның басқару алгоритмін таңдау, реттеу жүйесінің және реттегіштердің күйге келтіруінің опималды параметрлерін анықтау болып табылады. Жүйенің сруктурасы және реттегіштердің параметрлері технологиялық процестің басқару объектісі ретіндегі қасиетімен анықталады.
Технологиялық объектінің анализі барысында реттеу жүйесінің структурасын таңдау керек, яғни параметрлерді басқарудың қандай реттеу әсерін қолдануды анықтау. Технологиялық процестің автоматты реттеу жүйесінің синтезінің басты элементтерінің бір контурлы реттеу жүйесін есептеу болып табылады. Ол үшін структурасын таңдау және реттеу параметрлерінің сандық мәнін анықтау керек. Ереже бойынша реттеу құралдарының келесі типтік структурасын қолданамыз: пропорционалды П - реттегіш, интегралды И - реттегіш, пропорционалды - интегралды ПИ - реттегіш және пропорционалды - интегралды - дифференциалды ПИД - реттегіш заңы. Жүйені есептеу кезінде оның қолдану мүмкіндігі тексеріледі, егер ол талаптарды қанағаттандырмаса, күрделі заңдарға өтеді және сапасын көтерудің схемалық әдісін қолданады.
Автоматты реттеу теориясында берілген сапа критерийлеріндегі АРЖ - ін есептеудің түрлі әдістері, сонымен қатар реттегіш пен объектінің берілген параметрлерінің өтпелі процестің сапасының әдістері жасалған. Сонымен қатар есептеулерде көп уақыт керек ететін дәл әдістермен бірге, жақындату әдісі жасалынған, ол өтпелі процестің сапасының немесе реттегіштің параметрлерінің жұмысын анағұрлым жылдам бағалауға мүмкіндік береді, ретегіштерді күйге келтіруін есептеу үшін Циглер - Никольс әдісін қолданамыз. Басқару жүйеслерін жобалауда және басқару жүйелерінің өзін өзі күйге келтіруді жүзеге асыруды есептеу техникасын кең көлемде қолдану, автоматты реттеу жүйесін есептеумен байлансыты қиындықтарды азайтты. Қазіргі кезде автоматты реттеу жүйесінің есептеу үшін қолданбалы программалар пакеті жасалуда, дәл әдістер негізінде алгоритмдерді қолдануға мүмкіндік береді. Сонымен қатар жақындату әдәсі күрделі реттеу жүйесін есептеудің интеративті әдісі айнымалылардың бастапқы мәндерін таңдауда немесе күрделі технолгиялық объектінің автоматтандыру жүйесін жобалаудың бастапқы стадияларында қолданылады.
Бір контурлы автоматты реттеу жүйесінің реттегіштерінің күйге келтіруінің есептелуі. Реттегіштердің күйге келтіруінің оптималды реттеу жүйесінің сапа көрсеткіштерін анықтау кезінде интегралды сапа көрсеткіштеріне объект жұмысының ауыр әсер ету есебімен жүйенің тұрақтылығы запасымен таңдалады. Практикалық есептеулерде тұрақтылық запасын жүйенің тербеліс көрсеткішімен сипаттауға ыңғайлы: жүйе үшін оның мәні, реттеу заңының интегралды құрамасы бар тұйық реттеу жүйесінің амплитуда жиілік сипаттамасының максимумымен анықталады.
Әрі қарай реттегіштің күйге келтіруінің оптималдылығы интегралды квадрат критерийінің минимумы кезіндегі реттеу процесінің берілген тербеліс дәрежесін камтамассыз ету деп түсінеміз.
Ретегіштердің күйге келтіруінің есептеу әдістерінің ішінде кей біреулері дәл, бірақ қолмен есептеуде көп уақыт алады, ал кей біреулері қарапайым, бірақ жақындатылған.
Күйге келтіруді есептеудің жақындатылған және дәл әдістерінің ішінде көп тарағаны кеңейтілген жиіліктік сипаттама әдсі және тербелістердің өлшеу әдісі болып табылады.
Функционалдық схемадан негізгі электро-миксер қондырғысында температура және деңгейді өлшеу, бақылау және реттеу контурларын қарастырамыз. Электро-миксер негізгі көрсеткіш, ал деңгейді қосымша көрсеткіш ретінде аламыз.
R( p) = - Sп - Sи / p, негізгі реттегіштің беріліс функциясы R1 (p) = - Sп1 - Sи1 / p, қосымша реттегіштің беріліс функциясы
Циглер-Никольс әдісімен бірконтурлы АРЖ-гі икемдеулерін есептеу

Бастапқы берілгендері ретінде объектінің келесі түрдегі беріліс функциясы болып табылады:
Басқару алгоритімдеу
Басқару ұғымы қоғам мен түрлі ұйымдарда, қоғамдық-мемлекеттік тіршілікте, әсіресе қазіргі заманғы жүйелі-кибернетикалық ғылымдарда фундаменталды ұғымдардың бірі болып табылып, өз маңыздылығы бойынша философиялық категорияларға жақын.
Кез-келген басқару үрдісінің міндеті - басқару объектісіне мақсаттылық өзара әрекеттесулерді ұйымдастырып жүзеге асыру болып табылады. Басқару үрдісі объектті қалаулы қалып-күйге өткізу мақсатында шараларды іздестіріп жүзеге асыру болып табылады.
Басқару ұғымы «басқару объектісі», «әсер ету», «мақсат», «объекттің жұмыс жасау алгоритмі», «басқару алгоритмі» сияқты ұғымдармен байланысты.
Басқару объектісі - берілген жағдайда оның қалып-күйі субъектті қызықтыратын және субъект оған мақсаттылық әсерін тігізе алатын қоршаған ортаның бір бөлігі (сурет 1. 1) . Басқару объектісін ерекшелегенде кемінде екі шарт орындалуы тиіс:
· объектке әсер тигізуге болады;
· бұл әсер бізді объектке қойылатын мақсаттарға жақындатуы, яғни оның қалып-күйін біздің қалаған бағытта өзгертуі мүмкін.
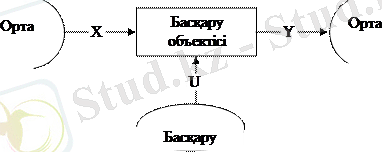
X - ортаның объектке әсерін тигізу арнасы; Y - объекттің ортаға әсерін тигізу арнасы; U - басқарудың объектке әсерін тигізу арнасы
Сурет 1. 1 Басқару объектісі және оның орта және басқарумен өзара әрекеттесуі.
Басқару объектілерге келтірілетін мысалдар саны өте көп. Біздің мамандық саласында әдетте ол технологиялық (түрлі заттарды өндіру және с. с. ), телекоммуникациялық, кеңселік және с. с. үрдістер.
Кез келген басқару үрдісінің бірінші кезеңі басқару объектісін ерекшелеп алу және әсер ету X, Y, U арналарын анықтау болып табылады.
Басқару есептерін шешу барысында «әсер ету» ұғымы тек ақпараттық мағынада қарастырылады. Басқару объектісін және әсер ету арналарын ерекшелеу тек басқарудың берілген мақсаты көз қарасынан орындалуы керек.
Басқару мақсаты - оларды басқару объектісі қанағаттандыруы тиіс болатын шарттарғ қасиеттер мен талаптар жиынтығы. Мақсат корректілі тұжырымдалған және техникалық тұрғыда жүзеге асырылатын кейбір критерий деп айтқан дұрыстау болады.
Басқару алгоритмі - басқару объектісінің нақтылы қалып-күйі белгілі болған жағдайда мақсаттылық әсер етуді (басқаруды) қалыптастыруға (синтездеуге) мүмкіндік беретін ережелер, әдістер және тәсілдер жиынтығы. Басқа сөзбен айтқанда, басқару алгоритмі түрлі ситуацияларда басқару мақсаттарына қалай жету керек екендігі туралы нұсқау болып табылады. Басқару алгоритмінің бар болуы кез келген басқару жүйенің тіршілік етуінің қажетті шарты болып табылады.
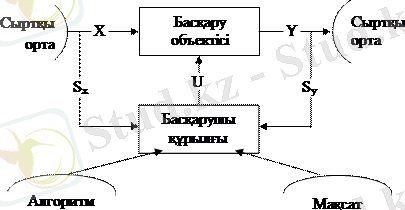
Басқару объектісі мен басқару алгоритмін жүзеге асыратын басқарушы құрылғыны біріктіру арқылы басқару жүйесін аламыз. Басқару жүйесі деп олардың өзара әрекеттесу үрдісі қойылған басқару мақсатының орындалуына әкелетіндей басқару объектісі мен басқарушы құрылғының жиынтығын атайды (сурет 1. 2) .
,
- басқару объекті туралы ақпарат алу арналары.
Сурет 1. 2 Басқару жүйесі
Басқару жүйесіне қатысты басқару мақсаты мен алгоритм сыртқы сипатқа ие. Ол басқару мақсаты мен алгоритм берілген басқару жүйе арқылы емес, басқа одан жоғары деңгейдегі жүйе арқылы анықталуына байланысты.
Сонымен, кез келген басқару үрдісі төрт аспектілерімен сипатталады:
1) объектке басқарушы әсер тигізілетін U арнасы;
2) басқарушы әсерлерді синтездеу үшін қажет болатын объект туралы ақпарат алынатын арналар (
3) басқару мақсаты;
4) басқару алгоритмі.
Басқару субъектісі - нақтылы техникалық жүйелер, үрдістер және механизмдер, тұлғалар, ұжымдарды, ұйымдарды, кәсіпорындарды, мемлекеттерді басқару жүйелері.
Объекттер қойылған мақсаттарға жетуі үшін субъект мақсаттар немесе берілген программаға негізделген объекттердегі басқару параметрлерін қалаулы өзгерістерге әкелетін басқару әсерлерді жүзеге асыруы тиіс.
Сонымен, басқару - ол бар ақпараттың негізінде белгілі бір мақсаттарға жетуге бағытталған үрдіс.
Басқару үрдістерін қарастыру барысында кибернетикалық тәсіл кең пайдаланылады. Кибернетика (ежелгі грек κυβερνητική / kybernetike сөзінен - «басқару өнері», kybernao сөзінен - «рульді басқарамын», κυβερνήτης / kybernētēs сөзінен - «кеменің рулін ұстап отырушы», жеке жағдайларда бұл сөздің түбірінен «губернатор» немесе ағылшын «government» - өкімет сөздері пайда болған) - машиналар, тірі ағзалар немесе қоғам сияқты түрлі жүйелерде басқару және ақпарат жіберу үрдістердің жалпы заңдылықтары туралы ғылым.
Кибернетиканың объектісі болып барлық басқару жүйелері табылады. Басқаруға бағынбайтын жүйелер негізінде кибернетиканың зерттейтін объектілер қатарына жатпайды. Кибернетика кибернетикалық тәсіл, кибернетикалық жүйе сияқты ұғымдарды ендіреді. Кибернетикалық жүйелер олардың материалдық табиғатына тәуелсіз абстрактілі түрде қарастырылады. Кибернетикалық жүйелердің мысалдары - техникадағы автоматты реттегіштер, ЭЕМ (ДК), адамның миі, биологиялық популяциялар, адам қоғамы. Мұндай әр жүйе ақпаратты қабылдауға, есте сақтауға, өндеу және алмасуға қабілетті өзара байланысқан объекттердің (жүйе элементтерінің) жиыны болып табылады. Кибернетика басқару жүйелерін және ой еңбегін автоматтандыру жүйелерін құрудың жалпы қағидаларын жетілдіреді. Кибернетика мәселелерін шешуге арналған негізгі техникалық құралдар - түрлі есептеуіш құрылғылар, ДК. Сондықтан, кибернетиканың жеке ғылым ретінде пайда болуы (Н. Винер, 1948) XX-шы ғасырдың 40-шы жылдары сондай машиналардың құрылуына байланысты, ал кибернетиканың теориялы және практикалық аспекттері тұрғысында дамуы - электронды есептеуіш техниканың прогресіне байланысты.
Технологиялық үрдісті автоматтандыру -адамның тікелей қатысуысыз немесе адамға аса маңызды шешімдерді қабылдау құзыретін қалдыратын технологиялық үрдістің өзін басқаруды жүзеге асыруға мүмкіндік беретін жүйелерді жүзеге асыруға арналған әдістер мен құралдар жиынтығы.
Әдетте, технологиялық үрдісті автоматтандыру нәтижесінде ТҮ БАЖ құрылады. Технологиялық үрдісті автоматтандырудың негізі - қабылданған басқару критерийге (оптималдылыққа) сәйкес зат және энергия ағындарын қайта тарату болып табылады.
Кәсіпорындағы технологиялық жабдықты басқаруды автоматтандыру жүйесі кәсіпорнын басқарудың автоматтандырылған жүйесімен (К БАЖ) байланысуы мүмкін. ТҮ БАЖ деп әдетте бүкіл өндірістегі немесе салыстырмалы түрде дайын өнімді шығаратын өндірістің жеке бір учаскесіндегі негізгі технологиялық операцияларды автоматтандыруды қамтамасыз ететін кешенді шешімді түсінеді. ТҮ БАЖ-дың құрамдас бөліктері ретінде жеке автоматты басқару жүйелері (АБЖ) немесе бірегей кешенге байланысқан автоматтандырылған құрылғылар болуы мүмкін. Әдетте ТҮ БАЖ технологиялық үрдісті операторлық басқарудың бір немесе бірнеше басқару пульттері түріндегі бірегей жүйесіне, үрдістің барысы туралы ақпаратты өндеу және архивтеу құралдарына, автоматтандырудың типтік элементтеріне: сезгіш құралдар, контроллерлер, орындаушы құрылғыларға ие. Барлық ішкі жүйелерді ақпараттық байланыстыру үшін өнеркәсіптік желілер қолданылады.
Басқару жүйенің құрамдас (және әдетте ең қымбат) бөлігі программалаудың түрлі технологиялары мен тілдерің пайдалану арқылы құрылатын программалық қамтамасыз ету(ПҚЕ) болып табылады.
2. АРНАЙЫ БӨЛІМ
- Автоматты реттеу жүйесінің өтпелі процесін тұрғызу және жүйенің сапа көрсеткіштерін анықтау.
В. В. Солодовников әдісі бойынша өтпелі процесс қисығын тұрғызу тұйықталған жүйенің Р(ω) нақты жиіліктік сипаттамасын трапециялармен алмастыруға негізделген.
h-функция кестесі көмегімен әрбір трапеция үшін өтпелі процесс қисығы анықталады. Осы алынған әрбір қисықтардың қосындысы бүкіл жүйенің өтпелі процесін береді.
P(ω) сипаттамасының бастапқы учаскелерін трапециялармен алмастырғанда өте мұқият болу керек, себебі бастапқы учаскелерді дұрыс аппроксимацияламаса есептеу нәтижесі қате болып шығуы мүмкін.
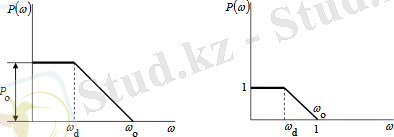
2. 1. 1 -cурет. Трапециялық жиілік сипаттамалар.
Автоматты реттеу жүйесінің қозғалыс орнықтылығы оның негізі, бірақ жеткілікті емес қасиеті болып табылады. Автоматты реттеу жүйесінің қозғалыс орнықтылығы немесе орнықсыздығы деп ондағы өтпелі процестің өшуінің бар немесе жоқ екендігінен түсінуге болады.
Реттеу процесінің сапасы ретінде автоматты реттеуіштің жеткілікті дәлдікпен реттелетін параметрдің шамасын белгіленген өзгеріс заңы бойынша ұстап отыру қабілетін айтуға болады. Реттеу процесінің сапасы реттелетін параметр белгіленген шамадан аз ауытқыса, әрі белгіленген режимге тез жетсе, соғұрлым жоғары болады.
Сапаның негізгі көрсеткіштеріне: реттеу мерзімі, асыра реттеу, тербелмелі және қалыптасқан статикалық ауытқу жатады. Оған қоса, нақты жағдайда реттеу сапасына басқа да талаптар қойылады, айталық, реттелетін шаманың өзгерісінің ең үлкен жылдамдығы, оның тербелісінің негізгі жиілігі т. б. 1. 1-суреттегідей h(t) өтпелі функция мысалында реттеу сапасының негізгі көрсеткіштерін қарастырамыз.
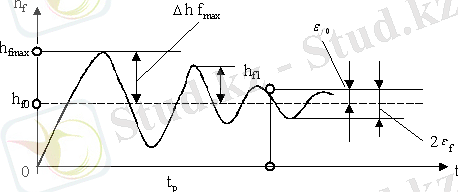
2. 1. 2-сурет. АРЖ сапа көрсеткіштері.
Реттеу мерзімі
 абсолют шама
абсолют шама
 жүйе жұмысының
жүйе жұмысының
 берілген дәлдігінің ауқымынан аспайтын деңгейге жеткеніне дейінгі уақыт аралығы.
берілген дәлдігінің ауқымынан аспайтын деңгейге жеткеніне дейінгі уақыт аралығы.
Іс жүзінде
реттеу мерзімі деп, өтпелі қате абсолют шамасының әлі де мүмкіндік мәнінен (әдетте, ол реттелетін параметрдің қалыптасқан мәнінің 3-5 % құрайды) кем болатын уақыт аралығын (өтпелі процесстің басынан) айтады. 0-ден
-ға дейінгі уақыт аралығы реттеу мерзімі болып табылады. Реттеу мерзімі өтпелі процесстің ұзақтығын анықтайды.
Асыра реттеу
 деп реттелетін шаманың процентпен өрнектелген қалыптасқан мәнінен
деп реттелетін шаманың процентпен өрнектелген қалыптасқан мәнінен
 максимал ауытқуын
максимал ауытқуын
 айтады.
айтады.
 абсолют шама өтпелі сипаттамадан анықталады:
абсолют шама өтпелі сипаттамадан анықталады:
=
 -
-
 .
.
Осыған сәйкес асыра реттеу мынаған тең болады:
Жүйенің тербелмелілігі реттелетін шаманың реттеу мерзімі кезіндегі тербеліс санымен сипатталады. Егер осы уақыт ішіндегі жүйедегі өтпелі процесс технология шарты бойынша алдын ала берілген санннан аз тербеліс жасаса, онда жүйе өзінің тербелмелілігі жөнінде қажетті реттеу талабында деуге болады.
Қалыптасқан статикалық ауытқу
(
 ) өтпелі процесс аяқталғаннан кейін реттелетін шаманың қалыптасқан мәні
) өтпелі процесс аяқталғаннан кейін реттелетін шаманың қалыптасқан мәні
 мен оның берілген мәні
мен оның берілген мәні
 арасындағы айырым түрінде анықталады:
арасындағы айырым түрінде анықталады:

Қажетті реттеу сапасына қол жеткізу үшін статикалық дәлділікті қамтамасыз ету керек. Статикалық қате реттеуіштің жалпы күшейту коэффициентін арттыру арқылы азайтылуы мүмкін.
Автоматты реттеу жүйесі бір-бірімен өзара байланысты реттелуші объект пен реттеуші органннан тұратыны белгілі. Бұл жүйені құрар алдында сериялық жабдықтар каталогынан реттеуші органды, орындаушы құрылғыны, датчикті таңдап алады. Бұл элементтер реттелуші объектімен бірге жүйенің өзгермейтін (берілген) бөлігін құрайды. Кейін, жүйенің статикалық және динамикалық сипаттамаларына қойылатын талаптар негізінде оның функционалдық және корректірлеуші құрылғылардан тұратын өзгермелі бөлігін анықтайды. Корректірлеуші құрылғылар жүйенің контурына тізбектеле, парраллель немесе кері байланыс түрінде қосылып, оның динамикалық қасиеттерін жоғарылатуға мүмкіндік туғызады.
Автоматты ретеу жүйесінің синтезі келесі этаптардан тұрады:
1) Реттеу объектісінің қасиеттерін талдау, статикалық және динамикалық сипаттамаларын анықтау;
2) Реттеу жүйесін қанағаттандыратын реттеу сапасының шарттарын, оптималдау критерилерін негіздеу және тұжырымдау;
3) Техникалық құралдарды талдап алып, жүйенің құрылымдық схемасын іске асыру;
4) Оптимал динамикалық сипаттамаларды синтездеу;
5) Оптимал режимді аппроксимациялау (жуықтау), яғни, реттеу сапасымен жүйенің жұмысын іске асырудың техникалық тұрғыдағы күрделі еместігі және оның сенімділігі арасындағы ымыраға келе отыра, жүйенің қалаулы динамикалық сипаттамасын алу;
6) Бүкіл жүйенің қалаулы динамикалық сипаттамасын толығымен қамтамасыз ететін корректірлеуші құрылғының динамикалық сипаттамасын анықтау;
7) Корректірлеуші құрылғының схемасын, техникалық пайдалану жолын және параметрлерін таңдап алу;
8) Қолайлы талаптарға сай келетін алынған автоматты реттеу жүйесінің схемасына талдау жүргізу.
Жалпы, автоматты реттеу жүйесінің қалаулы динамикалық сипаттамаларын арнайы корректірлеу құрылғыларын қолдану арқылы алады, себебі мұндай құрылғылардың параметрлерін жеңіл түрде тиімді өзгертіп отыруға болады. Коррекциалау құрылғылары жүйедегі негізгі сигнал өтетін трактіге тізбектеле немесе параллель қосылады.
Параллель қосылған корректрлеу құрылғысымен бүкіл жүйені немесе оның элементтерін жеке қамтуға болады. Тізбектеп қосылған корректрлеу құрылғысы қателік сигналын түрлендіру және реттеу заңын өзгерту үшін қолданылады.
2. 2 Автоматты басқару жүйесіндегі функциялар
Басқару жүйесін талдау кезінде шешілетін негізгі есеп АБЖ жүрісінің қасиетін санды түрде бағалау және анықтау болып келеді. Осы есептерді автоматика элементтерінің сипаттамаларын таңдау арқылы және буындарды өзара әртүрде қосу арқылы шешеді. АБЖ анализінің есебін шешуде талап етілген жүйенің сипаттамасын қамтамасыз ететін, автоматика элементтерінің және олардың өзара байланыстарын таңдау есепке алынады. Басқару жүйесінің анализі және синтезі төменде келтірілген үш негізгі есептерді шешуге әкеліп соғады:
· автоматты басқару жүйесінің сапалы сипаттамаларын табу;
· амплитуданы төмендететін тербеліс арқылы немесе жүйені берілген байсалды күйге қайтару кезіндегі орнықтылық шартын анықтау;
· АБЖ жұмысының орнықты режимінде қателерді табу және жою.
Жоғарыда динамикалық режиміндегі АБЖ кейбір сапа көрсеткіштері келтірілген. Белгілеп көрсеткеніміздей, кіріс сигналының секіріс тәрізді өзгерісі өтпелі үрдіс бағалауы үшін қолданылады. Бірлік секіріске жүйенің реакциясын өтпелі функция деп атайды. Айталық, кіріс сигналының бірлік секірісі (сатылы функция) мына түрде болсын:
Лаплас бойынша беріліс функция. Беріліс функциясы - бұл бастапқы мәндер нөлге тең болатын шарттар кезінде шығыс шаманың Лаплас бойынша бейнесін кіріс шаманың Лаплас бойынша бейнесіне қатынасы

Автоматты басқару жүйесінде екі полиномдардың бұл қатынасы операторлық беріліс функциясы деген атқа ие. Динамикалық түрде жүйенің қасиетін сипаттайтын беріліс функцияның бөлімі ( ) F1 p сипаттамалық полином деп аталады.
Теңдеудің түбірлерін F1 ( p) = 0 жүйенің полюсі деп аталады. Жүйенің шығыс шамасының бейнесін алу үшін кіріс шаманың бейнесін беріліс функцияға Y(p) =W(p) ⋅ X(p) көбейтсек жеткілікті.
Лаплас бейнесі бойынша жүйенің беріліс функциясы келесі қасиеттерге ие: W( p) коэффициенттері әрқашан да нақты (заттық) және алымының полином дәрежесі бөлімінің полином дәрежесінен аз болады.
Дифференциалды теңдеулерді Лаплас түрлендіруін қолданып шешу келесідей болады:
а) берілген кіріс әсері
 бойынша Лаплас түрлендіруі көмегімен
бойынша Лаплас түрлендіруі көмегімен
 бейнесін табамыз; б) дифференциалды теңдеу бойынша беріліс функцияны W( p) құрайды;
бейнесін табамыз; б) дифференциалды теңдеу бойынша беріліс функцияны W( p) құрайды;
в) шығыс шаманың бейнесін
 бойынша анықтайды;
бойынша анықтайды;
г) белгілі шығыс шаманың
 бейнесі бойынша шығыс функцияның
бейнесі бойынша шығыс функцияның
 түпнұсқасын табамыз. Шығыс функцияның
түпнұсқасын табу үшін түпнұсқа кестесін не болмаса жіктеу теоремасын пайдаланады.
түпнұсқасын табамыз. Шығыс функцияның
түпнұсқасын табу үшін түпнұсқа кестесін не болмаса жіктеу теоремасын пайдаланады.
Сіз бұл жұмысты біздің қосымшамыз арқылы толығымен тегін көре аласыз.
- Іс жүргізу
- Автоматтандыру, Техника
- Алғашқы әскери дайындық
- Астрономия
- Ауыл шаруашылығы
- Банк ісі
- Бизнесті бағалау
- Биология
- Бухгалтерлік іс
- Валеология
- Ветеринария
- География
- Геология, Геофизика, Геодезия
- Дін
- Ет, сүт, шарап өнімдері
- Жалпы тарих
- Жер кадастрі, Жылжымайтын мүлік
- Журналистика
- Информатика
- Кеден ісі
- Маркетинг
- Математика, Геометрия
- Медицина
- Мемлекеттік басқару
- Менеджмент
- Мұнай, Газ
- Мұрағат ісі
- Мәдениеттану
- ОБЖ (Основы безопасности жизнедеятельности)
- Педагогика
- Полиграфия
- Психология
- Салық
- Саясаттану
- Сақтандыру
- Сертификаттау, стандарттау
- Социология, Демография
- Спорт
- Статистика
- Тілтану, Филология
- Тарихи тұлғалар
- Тау-кен ісі
- Транспорт
- Туризм
- Физика
- Философия
- Халықаралық қатынастар
- Химия
- Экология, Қоршаған ортаны қорғау
- Экономика
- Экономикалық география
- Электротехника
- Қазақстан тарихы
- Қаржы
- Құрылыс
- Құқық, Криминалистика
- Әдебиет
- Өнер, музыка
- Өнеркәсіп, Өндіріс
Қазақ тілінде жазылған рефераттар, курстық жұмыстар, дипломдық жұмыстар бойынша біздің қор #1 болып табылады.

Ақпарат
Қосымша
Email: info@stud.kz