Сақиналы индукциялы бұрыш датчигінің теориясы мен есептік-конструкторлық негіздері

Мазмұны
Кіріспе
- Теориялық бөлім
1. 1 Сақиналы индукциялы бұрыш датчигінің конструкциясы . . . 6
1. 2 Сақиналы индукциялы бұрыш датчигінің орындалу принципі . . . 9
1. 3 Сақиналы индукциялы бұрыш датчигінің параметрлері . . . 12
1. 4 Сақиналы индукциялы бұрыш датчигінің қателіктері . . . 15
- Есептік - конструкциялық бөлім . . . 18
2. 1 Магнитті сым геометриялық таңдау . . . 19
2. 2 Сақиналы индукциялы бұрыш датчигінің параметрлерін және орамдарын есептеу . . . 27
Қорытынды . . .
Қолданылған материалдар тізімі . . . 28
Кіріспе
Гироскоптың бұрыштық жағдайын анықтау үшін және бұл берілгендерді гироприбормен басқару жүйесіне беру үшін кардандық сақинаның айналу бұрышын дистанциондық беріліске және одан әрі қолдануға қолайлырақ басқа физикалық шамаға түрлендіру қажет. Мұндай түрлендіруді орындайтын құрылғыларды бұрыш датчиктері деп атайды. Бұрыш датчигі ретінде әр түрлі типтегі құрылғылар қолданылуы мүмкін: патенциометрлік, индукциялық, сыйымдылықтық, фотоэлектрлік, пневматикалық, электромашиналық және т. б.
Берілген жұмыста сақиналы индукциялы бұрыш датчигінің параметрлерін және орамдарын есептеу жүргізіледі және қарастырылады: ротор және статор арасындағы аралық шамасы, қозжыру орамының тармақтарының эффектілі саны, екінші орам тармақтарының эффектілі саны, қоздыру орамдарының сымдарының қиылысуы, екінші орам сымдарының қиылысуы, статор пакетінің ұзындығы.
Есеп [2] және [4] әдістемелер бойынша техникалық тапсырмаларда берілген шамаларда ескеріп орындалады.
- Теориялық бөлім1. 1 Сақиналы индукциялы бұрыш датчигінің конструкциясы
Сақиналы индукциялы бұрыш датчигі өзімен бірге ротордың қатысты бұрыштық жағдайына және датчик статорына байланысты өзгеретін жазық типін ауыспалы трансформация коэффициентінен айналмалы трансформаторларды сипаттайды [2] . Бұрыш датчигін сипаттайтын басты шамаларға төмендегілер жатады:
а) қолданылатын қуат және қажетті мәндегі қоздыру кернеуінің және желі жилігінің тогы;
б) айналым бұрышының жұмыс диапазоны;
в) шығыс сипаттамасының үлкен мәні;
г) ротор айналымының бұрынша қатысты шығыс кернеуінің сызықтық дәрежесі;
д) бұрыш белгісінің өзгеруіне қатысты шығыс кернеуінің симметриясы;
е) нольдік деңгейдегі қалдық Э. Қ. К;
ж) датчиктің шығыс кедергісі;
и) реактивті момент мәні.
Сақиналы датчик бірінші және екінші орамдар аралығындағы өзараиндукциялы коэффициенттің өзгеру принципке байланысты үш түрге бөлінеді:
а) статорда және роторда дайындалған немесе орналастырылған орамдар датчигі;
б) роторда қысқа тұйықталған орамы бар датчик;
в) роторда орамы жоқ датчик.
Сақиналы бұрыш датчигінің осы түрлерінің әр қайсысының артықшылығын қысқаша қарастырамыз:
а) статорда және роторда орамалары бар сақиналы индукцияны бұрыш датчигі. Қазіргі таңда сақиналы датчиктің бұл түрі гироскопиялық аспапта кеңінен таралған. Магнитті сым датчигі екі сақинадан тұрады (1-сурет), олардың пазаларында электрлі өзара перпендикулярлы дайындалған немесе белгіленген екі орам орналастырылған.
Бұрыш датчигінің жұмысына эксцентриситеттің әсерін жою мақсатында орамдар көпполюсті болып орындалады. Реактивті моментті кеміту үшін бір тістік бөлікке магнитті сымдардың сыртқы және ішкі пазасын анықтайды. Көптеген бұрыш датчигінде статор және ротор орамдары аралығының өзараиндукциялы коэффициенті ротор айналымының а э =ρα электрлі бұрышынан синусойдалы заң бойынша өзгереді. Бұл жағдайда шығыс сипаттамасының қанағаттанарлық сызықтығы (1%-ға дейін) ротор айналымы бұрышының ±15 0 диапазонында жетеді.
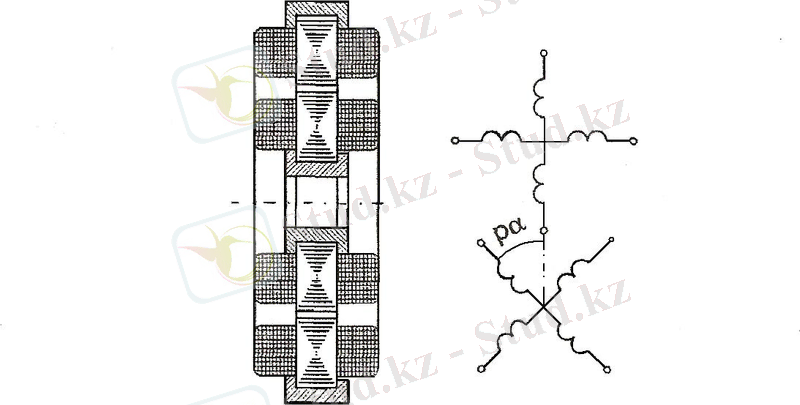
1-сурет - Сақиналы индукциялы бұрыш
датчигінің принципиалды сұлбасы.
Бұрыш датчигінің жұмысын принципиалдық ротор және статор орамдарында бір бірден болса жеткілікті. Статорда және роторда орамдардың екі электрлі өзара перпендикулярлы болып қолданылуы датчиктің көп универсалдылау болуына және оны бұрыштың синхронды берілуінде қолдануына мүмкіндік береді.
б) Роторда қысқа тұйықталған орамы бар датчик. Роторда бірінші және екінші орамы бар датчиктердің кемшілігі болып роторға ток өткізуді орындау қажеттілігі табылады.
Бұл ротордың айналуына қажетті моменьі үлкейтуі, ол датчиктің дәлдігін төмендетуге және оның жұмысының тұрақтылығын азайтуға әкеліп соғады. Бұл кемшілігін жою үшін роторды қысқа тұйықталған ораммен орындайды, ал статорда 90 0 -қа дейін екі ораммен орындайды. Статор орамының бірі - қоздыру орамы, ал екіншісі - шығыс орамы.
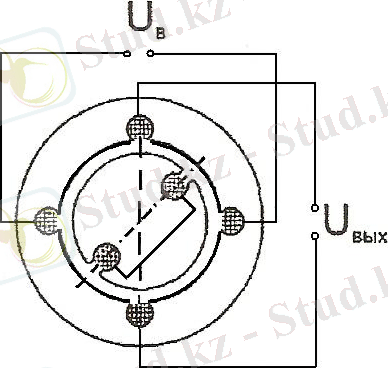
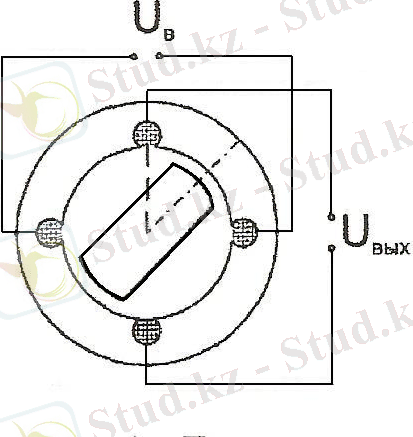
2 сурет - Роторында 3 сурет - Айқын полюсті
тұйықталған тармақты ротормен бұрыш датчигі.
бұрыш датчигі
Датчиктің шығыс Э. Қ. К-і роторда магниті ағынды құратын көлдеңенді құрайды.
Роторда қысқа тұйықталған орамы бар датчик салыстырмалы қарапайым конструкцияны құрайды, алайда ротор контурында токпен кері әсер етуші моменттің болуына әкеліп соғады, ол роторда және статорда орамы бар бұрыш датчигіне сәйкес момент шамасын үлкейтеді.
в) Роторда орамы жоқ бұрыш датчигі. Датчиктің принципиалды сұлбасы 1. 3-суретте көрсетілген. Датчиктің статорында, осьтері 90 электрлі градусқа араласқан екі орам орналасады. Орамның бірі - қоздыру орамы, екіншісі - шығыс. Ротор айқынполюсті және статор орамы секілді сондай полюстердің пар санынан тұрады. Датчиктің шығыс орамында полюстердің осімен Э. Қ. К осінің сәйкес келуі нөлге тең. Бұл бұрыш 45 электрлі градусқа тең болған кезде, Э. Қ. К-і максималды мәнді иеленеді.
Бұл типті датчиктің кемшіліктері - реактивті моменттің болуы және шығыс Э. Қ. К-нің ротор айналымының бұрышынан тәуелділігіне байланысты үлкен дәрежелі сызықтық еместігі.
Аталған кемшіліктерді айқын полюсті статор және ротор конструкциясын қолдану барысында және орамдарды дифференциалды қосу сұлбасына алып тастауға болады.
Одан әрі статор және ротордағы орамдармен сақиналы индукциялы бұрышы датчигін анықтаймыз.
Техникалық тапсырмаға сәйкес сақинасы индукциялы бұрыш датчигі статорда және роторда екі өзара перпендикулярлы орамдармен екі полюсті болып табылады.
- 1. 2 Сақиналы индукционды бұрыш датчигінің орындалу принципі
Бұрыш датчигі айналым бұрышын α екі айнымалы кернеуге түрлендіреді, олардың амплитудалары пропорционалды сәйкес sinα және cosα.
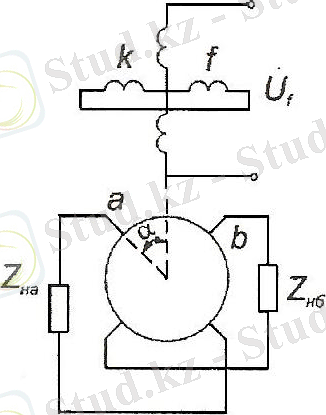
4-сурет - Электрлі сұлба 5-сурет - Жұмыс принципі
Бұл түрлендіру екі полюсті төрт орамды ВТ көмегімен неғұрлым қарапайым орындалады. Қосу сұлбасы 4-суретті көрсетілген. Мұнда f қоздыру орамы (field winding) ; к - квадратты орам (killer winding) ; а - косинусты орам; б - синусты орам.
ВТ жұмысының негізгі режимдерін қарастырған кезде аламыз [3] :
а) статор және ротор орамдарды арасындағы өзіндік индукция коэффициенті;
б) синусойдалды (косинусойдалды) заң бойынша өзгереді;
в) статордағы (ротордағы) орамдар электрлі перпендикулярлы;
г) болаттағы жоғалтулар біршама аз;
д) статор және ротор орамаларының өзіндік параметрлері қос-қостан бірдей және тұрақты.
Мұндай ВТ идиалданған деп аталады.
Қарапайым болып бос жүріс Z
на
=Z
нб
=
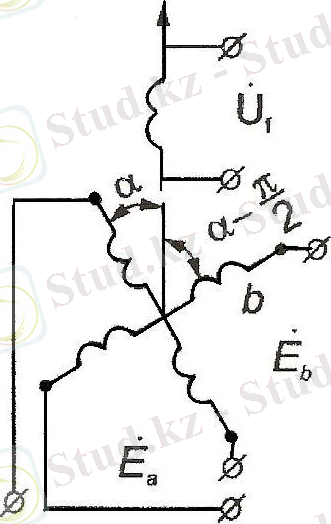
 режимі жатады. Қоздыру орамы айналмалы ток желісіне қосқан кезде машинада айнымалы ұзартылған магнит ағыны Ф қалыптасады, оның осі қоздыру арасының осімен сәйкес келеді. 6-суретке сәйкес бұл ағын қоздыру орамында Э. Қ. К-ін индукциялайды.
режимі жатады. Қоздыру орамы айналмалы ток желісіне қосқан кезде машинада айнымалы ұзартылған магнит ағыны Ф қалыптасады, оның осі қоздыру арасының осімен сәйкес келеді. 6-суретке сәйкес бұл ағын қоздыру орамында Э. Қ. К-ін индукциялайды.

 (1)
(1)
 (2)
(2)
Мұндағы
 және ω
эф
- қоздыру орамының тармақтарының және екінші орамның эффектілі мәні;
және ω
эф
- қоздыру орамының тармақтарының және екінші орамның эффектілі мәні;
Е - орам осьтері сәйкес келгендегі екінші Э. Қ. К-нің орындаушы мәні.
Қоздыру орамы үшін Э. Қ. К-ң теңдеуі мына түрде болады:
 (3)
(3)
Бұл теңдеуде 6-суретте көрсетілген орналастыру сұлбасы сәйкес келеді. Екінші орам, оның осі қоздыру орамының осімен сәйкес келгенде қолдануға арналған.
 (4)
(4)
Қатынасы кернеу бойынша беріліс коэффиценті деп аталады.
Идеалданған ВТ-дағы бос жүріс режимінде квадратты орамның ЭҚК-і
 нөлге тең жүктеме кезінде ВТ-ның екінші орамы
нөлге тең жүктеме кезінде ВТ-ның екінші орамы
 әртүрлі кедергілерінде электромагнитті процесте біршама қиындатылады. Екінші ретті а және б орамдарында Iа және Iб токтары пайда болады. Олар қоздыру орамдағы токтармен бірге ұзартылған осьте магниттеуші күштерді тудырады.
әртүрлі кедергілерінде электромагнитті процесте біршама қиындатылады. Екінші ретті а және б орамдарында Iа және Iб токтары пайда болады. Олар қоздыру орамдағы токтармен бірге ұзартылған осьте магниттеуші күштерді тудырады.
 (5)
(5)
көлденең ось бойынша
 (6)
(6)
Бұл магниттеуші күштерге ұзартылған және көлденең магнит ағындары Фd және Фq сәйкес келеді, оларды 7-сурет сұлбасымен жалғанған екі бір фазадан үш орамды трансформатор жиынтығы ретінде есептетуге болады.
Өзінің қоздыру орамының кедергісінде кернеудің төмендеуін болдырмаған кезде магнит ағыны Фd турақты болып қалады және келесі теңдеуден табуға болады.
 (7)
(7)
Көлденең ағын екінші орамдағы қосымша ЭҚК-ін индукциялайды, бұл роторды айналу бұрамына тәуелді.
 (8)
(8)
Бұл ағын екінші орамдағы қосымша ЭҚК-ін индукциялайды, бұл ротордың айналым бұрышынан
 екінші кернеудің синусойдалы тәуелділікте ауыткуына әкеліп соғады. Қысқа тұйықталған квадратты орамда бұл ағын демпферленеді және кезкелген жүктеме кедергісіндегі ротордың айналым бұрышынан шығыс кернеуі синусоидалды тәуелділігін сақтайды. Бұл жағдайда бірінші ретті симметриялау орындалды деп қарастырылады.
екінші кернеудің синусойдалы тәуелділікте ауыткуына әкеліп соғады. Қысқа тұйықталған квадратты орамда бұл ағын демпферленеді және кезкелген жүктеме кедергісіндегі ротордың айналым бұрышынан шығыс кернеуі синусоидалды тәуелділігін сақтайды. Бұл жағдайда бірінші ретті симметриялау орындалды деп қарастырылады.
Көлденең ағын Ф q нөлге тең, егер
 (9)
(9)
 және
және
 токтары мынаған тең
токтары мынаған тең
 (10)
(10)
мұндағы Z-екінші орамның жеке кедергісі.
Бұл мәндер (9) формуладағы қарап отырып,
 аламыз. Бірақ екінші ретті симметриялау деп аталатын шарт бойынша екінші ретті кернеу ротордың айналу бұрышынан синусоидалды заң бойынша өзгереді.
аламыз. Бірақ екінші ретті симметриялау деп аталатын шарт бойынша екінші ретті кернеу ротордың айналу бұрышынан синусоидалды заң бойынша өзгереді.
1. 3 Сақиналы индукциялы бұрыш датчигінің параметрлері
Сақиналы индукциялы бұрыш датчигі осы немесе басқа сұлбада оның қолдану мүмкіндігін анықтайтын жәнге жұмыс дәлдігін сипаттайтын шамалармен бірге. Бірінші топтағы шамаларға мыналар жатады:
 - қоздырудың номиналды кернеуі;
- қоздырудың номиналды кернеуі;
 - желі жиелігі;
- желі жиелігі;
 трансформация коэффиценті немесе
трансформация коэффиценті немесе
 кернеуі бойынша беріліс коэффиценті;
кернеуі бойынша беріліс коэффиценті;
 - кіріс және шығыс кедергілері;
- кіріс және шығыс кедергілері;
 -екінші ретті ЭҚК-і және берілген кернеу аралығындағы фазаның қозғалу бұрышы. Олардың орналасу сұлбасы 6-суретте көрсетілген.
-екінші ретті ЭҚК-і және берілген кернеу аралығындағы фазаның қозғалу бұрышы. Олардың орналасу сұлбасы 6-суретте көрсетілген.
 (11)
(11)
 (12)
(12)
 (13)
(13)
 (14)
(14)
Бұл параметрлерді иелене отырып, сақиналы индукцияны бұрыш датчигінің жұмысын сипаттайтын сұлбада кезкелген электромагнитті шаманы анықтау қиын емес: қолданатын ток және қуат, шығыс кернеуі, оптималды жүктемені және т. б. екінші топтағы дәлдікті сипаттайтын шамалар маңыздылау болып келеді; олар нақты машинаның идиалданғаннан қандай айырмашылығы бар екендігін анықтайды.
Бұл шамаларға мыналар жатады:
а) Ротор айналымы бұрышынан екінші ЭҚК-не синусоидалы тәуелді амплитудалы қатысты қателік; ол пайызбен немесе бұрыш минутымен өлшенеді:
(15)
мұндағы минуттағы максималды бұрыш қателігі %-пен көрсетілген амплитудасы қатысты қателікте дәлдік класы анықталады: 0, 01; 0, 02; 0, 05; 0, 1; 0, 2; 0, 3;
б) Сақиналы индукциялы бұрыш датчигінің статор және ротор орандарының перпендикулярлы еместігін сипаттайтын нөлдік нүкте ассиметриясы. Оны анықтау үшін сақиналы индукциялы бұрыш датчигі бірінші орам жағынан кезекпен қыздырылады және содан кейін екінші орамның ЭҚК-і нөлге тең кезіндегі ротордың бұрыштық жағдайы анықталады. Бұл бұрыштық жағдайдың 90°-қа тең бұрыштан ауытқуы сақиналы бұрыш датчигінің нөлдік нүкте ассиметриясын сипаттайды.
в) Нөлдік нүктеде қалдық ЭҚК-і (е ос , %), сақиналы индукциялы бұрыш датчигінің бір фазалы қоректену кезіндегі әртүрлі технологиялық себептен электрлі және магнитті магнит ассиметриясы негізінде элипсті айналмалы магнитті ауданға айналады. Ол негізгі магнитті ағыннан ЭҚК-не қатысты бірнеше бұрышқа фаза бойынша ауытқыған екінші ретті ЭҚК-і орамында индукцияланады. Бұл қосымша ЭҚК-і, 8-суретке қатысты фаза бойынша негізгі ЭҚК-і және квадратты ЭҚК-не сәйкес келетін екі құрастырушыға бөлінуі мүмкін. ЭҚК фазасы бойынша сәйкес келетін шама ротор айналымымен компенсацияланады, бұл нөлдік нүктені ассиметриялайды. Квадратты ЭҚК компенсациялана алмайды, ол сызықты емес магнитті сымның магниттелуінен пайда болатын негізгі жиілік ЭҚК-тен және жоғары гормонды ЭҚК-тен тұратын қалдық ЭҚК-н сипаттайды.
... жалғасыСіз бұл жұмысты біздің қосымшамыз арқылы толығымен тегін көре аласыз.
- Іс жүргізу
- Автоматтандыру, Техника
- Алғашқы әскери дайындық
- Астрономия
- Ауыл шаруашылығы
- Банк ісі
- Бизнесті бағалау
- Биология
- Бухгалтерлік іс
- Валеология
- Ветеринария
- География
- Геология, Геофизика, Геодезия
- Дін
- Ет, сүт, шарап өнімдері
- Жалпы тарих
- Жер кадастрі, Жылжымайтын мүлік
- Журналистика
- Информатика
- Кеден ісі
- Маркетинг
- Математика, Геометрия
- Медицина
- Мемлекеттік басқару
- Менеджмент
- Мұнай, Газ
- Мұрағат ісі
- Мәдениеттану
- ОБЖ (Основы безопасности жизнедеятельности)
- Педагогика
- Полиграфия
- Психология
- Салық
- Саясаттану
- Сақтандыру
- Сертификаттау, стандарттау
- Социология, Демография
- Спорт
- Статистика
- Тілтану, Филология
- Тарихи тұлғалар
- Тау-кен ісі
- Транспорт
- Туризм
- Физика
- Философия
- Халықаралық қатынастар
- Химия
- Экология, Қоршаған ортаны қорғау
- Экономика
- Экономикалық география
- Электротехника
- Қазақстан тарихы
- Қаржы
- Құрылыс
- Құқық, Криминалистика
- Әдебиет
- Өнер, музыка
- Өнеркәсіп, Өндіріс
Қазақ тілінде жазылған рефераттар, курстық жұмыстар, дипломдық жұмыстар бойынша біздің қор #1 болып табылады.

Ақпарат
Қосымша
Email: info@stud.kz