Разработка ультразвукового устройства Eye Helper для навигации людей с нарушениями зрения

Министерство образования и науки Республики Казахстан
Евразийский национальный университет имени Л. Н. Гумилева
Жакупов Амир Ерболатович
Разработка устройства «Eye helper» для людей
с ограниченными возможностями
тема дипломной работы (проекта)
ДИПЛОМНАЯ РАБОТА
специальность 5B070400 - «Вычислительная техника и программное обеспечение»
Нур-Султан 2020
Министерство образования и науки Республики Казахстан
Евразийский национальный университет имени Л. Н. Гумилева
«Допущен (а) к защите»
Зав. кафедрой
ФИО
ДИПЛОМНАЯ РАБОТА
На тему: «Разработка устройства «Eye helper» для людей
с ограниченными возможностями»
по специальности 5B070400 - «Вычислительная техника и программное обеспечение»
Выполнил: Жакупов Амир Ерболатович
Научный руководитель к. э. н., доцент ФИО руководителя
Нур-Султан 2020
СОДЕРЖАНИЕ
Введение
1. 1 Цель проекта
1. 2 Задачи
1. 2. 1 Объект исследования
1. 2. 2 Методы исследования
1 ГЛАВА. ОБЗОР СУЩЕСТВУЮЩИХ АППАРАТНЫХ И ПРОГРАММНЫХ СРЕДСТВ
1. 1 Аппаратные средства
1. 2 Программные средства
1. 3 Аппаратно-программные
2 ГЛАВА. ПРОЕКТНАЯ ЧАСТЬ
2. 1 Аппаратная часть
2. 1. 1 Структура устройства
2. 1. 2 Описание принципиальной электрической схемы
2. 1. 3 Выбор и расчет элементов схемы
2. 1. 4 Конструкция устройства
2. 2 Программная часть
2. 2. 1Алгоритм функционирования
2. 2 Описание программы
2. 3 Технология подготовки и отладки ПО
2. 4 Результаты тестирования и отладки ПО
3 ГЛАВА. ПРИМЕР РАБОТЫ
Заключение
Список использованных литературных источников
Приложение
Введение.
По статистике Всемирной организации здравоохранения, в мире насчитывается 40 млн. полностью незрячих и 290 млн. человек имеют проблемы со зрением. В Казахстане, по данным Минздрава, зарегистрировано 56 тысяч человек, из которых 1800 детей, с проблемами со зрением. По прогнозам специалистов, к 2050 году людей с близорукостью будет насчитываться примерно 4, 5 млрд. человек - это половина населения земного шара - и около 115 миллионов незрячих.
Большинство незрячих людей продолжают исследовать свое окружение самым простым способом - тактильной тростью, но это не дает полную картину окружающего мира. Дома она не применима поэтому встает необходимость в создании устройства, которое можно применять и на улице, как дополнение к трости.
Известно, что не все живые существа на нашей планете используют глаза в качестве основного органа для навигации в пространстве. Например, летучие мыши или дельфины замечают объекты, преграждающие им путь, или добычу, испуская неслышимые для человека ультразвуковые волны, с частотой колебаний 20 кГц, и улавливая отраженное от предметов эхо.
Устройство «Eye helper» для слабовидящих работает по схожему принципу, имея миниатюрные размеры, вес и длительное время автономной работы. Надеюсь, это устройство сделает жизнь слепых и слабовидящих людей несколько проще.
- Цель проекта
Цель проекта создать недорогое и эффективное устройство, которое поможет незрячим людям безопасно передвигаться, обнаруживать препятствия и взаимодействовать с объектами в помещении и на улице, как дополнение к трости.
Проверить предложенную систему с учетом демонстрационных препятствий.
- Задачи
В данной дипломной работе необходимо разработать устройство, основанное на ультразвуковых датчиках, которые воспринимают объекты на расстоянии от 2 см до 3, 5 м, имеют быстрое время отклика (доли секунды), что позволяет быстро определять препятствие и сообщать о нем посредством вибрации разной интенсивности и длительности (в зависимости от расстояния и объекта) . Также в устройстве будет использоваться GPS модуль, который позволяет отслеживать координаты и параметры перемещения, и отправлять эти данные на мобильное устройство.
1 ГЛАВА. ОБЗОР СУЩЕСТВУЮЩИХ АППАРАТНЫХ И ПРОГРАММНЫХ СРЕДСТВ
Все системы, устройства и приборы, которые используются инвалидами для помощи в их повседневной жизни, облегчения их деятельности и обеспечения безопасной мобильности, включены в один общий термин: ассистивная технология.
В 1960-х годах была внедрена ассистивная технология для решения повседневных проблем, связанных с передачей информации (например, личная гигиена), навигационные и ориентирующие средства, связанные с помощью мобильности.
Эта вспомогательная технология стала доступной для незрячих людей с помощью электронных устройств, которые обеспечивают пользователям обнаружение и локализацию объектов, чтобы предложить этим людям ощущение внешней среды с использованием функций датчиков. Датчики также помогают пользователю с задачей мобильности, основанной на определении размеров, диапазона и высоты объектов.
Большинство электронных средств, которые предоставляют услуги для людей с нарушениями зрения, зависят от данных, собранных из окружающей среды (с помощью лазерного сканера, датчиков камер или гидролокатора) и переданных пользователю либо через тактильный, аудио формат, либо через оба. Обсуждаются различные мнения, по которым лучше тип обратной связи, и это все еще открытая тема.
Однако, независимо от услуг, предоставляемых любой конкретной системой, существуют некоторые основные функции, необходимые в этой системе, чтобы обеспечить справедливую производительность. Эти особенности могут быть ключом к измерению эффективности и надежности любого электронного устройства, предоставляющего услуги навигации и ориентации для людей с нарушениями зрения.
Все предыдущие разработки, связанные с этой технологией, будут продемонстрированы в этой главе. Преимущества и недостатки данных проектов также будут рассмотрены.
- Аппаратные средства
Особое практическое значение в формировании умений и навыков мобильности в пространстве у слепых людей имеют трости (обычные, длинные, складные, лазерные) . Трости отличаются по длине, материалу, форме ручек и наконечников. Они «расширяют зону осязательного обследования, помогают слепым обнаруживать различные ориентиры и препятствия, трости выполняют функции щупа, буфера, генератора звука». Трость является основным и одним из самых универсальных технических средств ориентирования.
- Программные средства
Средства спутниковой навигации (gps и glonas) - используются посредством специальных устройств или смартфонов, оборудованных программами речевого вывода, позволяют определять место нахождения пользователя и по его координатам получать хранящуюся в базе данных информацию об окружающем пространстве. В последнее время завоёвывают всё большую популярность у инвалидов по зрению.
- Аппаратно-программные
GuideCane - компьютеризированное средство для помощи в навигации слепых людей
GuideCane - одно из первых вспомогательных устройств для незрячих людей. Устройство разработано для безопасного и относительно быстрого перемещения среди препятствий и других опасностей, с которыми сталкивается слепой пешеход. Средство состоит из длинной трости с сенсорной головкой на 2 свободно управляемых колесах. Ультразвуковые датчики вмонтированы в головку для обнаружения препятствий впереди. Устройство поворачивает, когда оно обнаруживает какое-либо препятствие, и пользователь чувствует команду рулевого управления через ручку. Основным недостатком устройства является то, что он может обнаружить только препятствие перед ним и устройство зависит от того как пользователь будет им управлять.
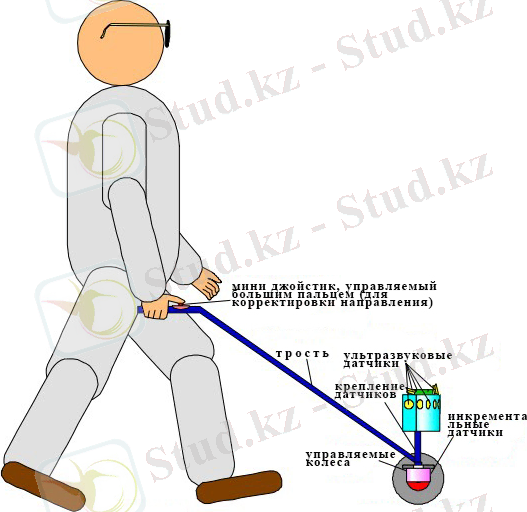
На рисунке 2. 1 показан слепой пользователь, идущий с помощью GuideCane.
TheNavBelt: компьютеризированная туристическая помощь от Шрага Шова
NavBelt - одна из самых любимых вспомогательных технологий для слепых. Устройство состоит из портативного компьютера, ультразвуковых датчиков и стереофонических наушников. Система NavBelt обеспечивает акустическую обратную связь в двух различных режимах работы: режим навигации и режим изображения, объясненные ниже.
а) Режим навигации
Режим навигации - это новая концепция ETA для быстрого и безопасного передвижения. В этом режиме местоположение цели или направление движения известны системе. Один акустический или тактильный сигнал активно направляет пользователя в преследовании цели, помогая при этом избегать препятствия на пути.
б) Режим изображения
Режим изображения предоставляет пользователю акустическое или тактильное изображение окружающей среды (панорама в 120 °) . Расширенные алгоритмы статистической обработки сигналов компенсируют неточности датчиков и предоставляют пользователю более точный и интуитивно понятный образ, чем существующие ETA.
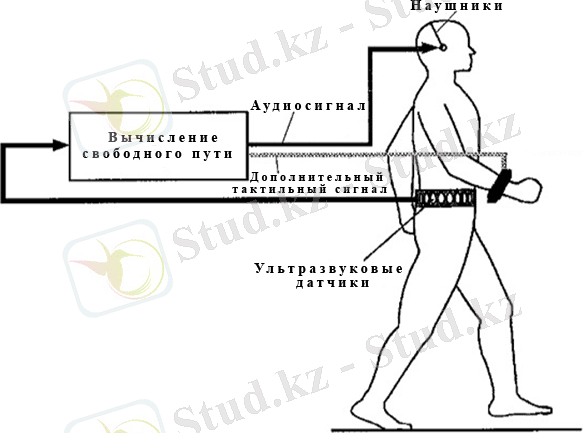
Рисунок. NavBelt: компьютеризированная туристическая помощь для слепых
Умная трость
Умная трость для слепых, которая дает немного искусственного видения, позволяя избегать препятствия. Это устройство разработано с учетом характеристик классических портативных устройств, оно имеет низкое энергопотребление и легкий вес. Аппаратное обеспечение состоит из микроконтроллера, объединенного с датчиком эхолота, датчиком приближения, мокрым детектором, двигателем микропейджера и дополнительным оборудованием. Схема имплантированной умной трости соответствует нескольким подсистемам. Эти подсистемы основаны на сенсорной основе. Интегральная схема разработана на основе схемы на микроконтроллере PIC (PIC16F90) . Этот микроконтроллер управляет всей схемой, функционируя и связывая подсистемы в правильном порядке.
На рисунке 2. 3 показана физическая структура смарт-ручки. Схема устройства состоит из датчиков Ping Sonar Sensor, которые используются для обнаружения расстояний до препятствий, ультразвуковой датчик GH311 применяется для определения того, что находится внизу ручки, пара электродов для определения влажности в его основании. Микроконтроллер PIC16F690 считывает данные с этих датчиков и управляет зуммером, светодиодом и двигателем с ШИМ. Вибрационный модуль состоит из Micro Pager Motor, выходы которого обеспечиваются ШИМ для получения другой вибрационной схемы. Аудио выход обозначен зуммером. Выходные сигналы управляются PWM для сохранения четкой звуковой формы, а также для индикации состояния схемы.

Рисунок. Умная трость
Показания на выходе, предоставляемые микроконтроллером, различаются по датчику. На основании силы вибрации двигателя или звукового сигнала зуммера или мигания светодиода, встроенного в ручку, инвалид может определить, идет ли он к люку, краю или большому отверстию на близлежащем пути или что-то похожее. В то же время он может почувствовать его / ее расстояние от близлежащих объектов и если он / она идет по мокрой или грязной или потенциально скользкой местности. Микроконтроллер и силовая схема (предпочтительно на батарейках) являются важной частью схемы. Простота конструкции облегчает использование любым человеком, и в то же время стоимость изготовления таких тростей остается низкой.
Бионический глаз
Бионический глаз - искусственная зрительная система для восстановления потерянного зрения. В глаз с поврежденной сетчаткой вживляют имплантат - протез сетчатки глаза, дополняя саму сетчатку c оставшимися в ней неповрежденными нейронами.
Технология отличается тем, что в специальные очки встраивается камера, с которой информация посылается на видеопроцессор, который пациент носит на поясе. Процессор преобразует картинку в электронный сигнал и отсылает его на специальный передатчик, также встроенный в очки. Затем этот передатчик посылает беспроводной сигнал на тончайший электронный ресивер, встроенный в глаз и фотосенсор (электродная панель), который имплантирован в сетчатку глаз пациента.
Электроды фотодатчика стимулируют оставшиеся действующие зрительные нервы сетчатки глаза, посылая электрические видеосигналы в мозг через зрительные нервы
Sonar Vision
Израильские ученые разработали специальную систему Sonar Vision, которая способна преображать изображение в звуковые сигналы. Она работает аналогичным образом, что и система эхолокации у летучих мышей, только вместо щебетания применяется видеокамера, встроенная в очки. Ноутбук или смартфон преобразует изображение в звук, который в свою очередь передается на гарнитуру. Согласно проведенным экспериментам, после специального обучения, слепые люди с помощью устройства смогли идентифицировать лица, здания, положение объектов в пространстве и даже определять отдельные буквы. Основных недостатком данного устройства является то, что оно «забивает» звуковые каналы слепых людей.
Слияние искусственного зрения и GPS (FAV & GPS)

Рисунок 3. Пример использования устройства
В данной разработке было создано ассистивное устройство с целью улучшения картографирования местоположения пользователя и позиционирования окружающих объектов с использованием двух функций: на основе метода сопоставления карт и искусственного зрения. Первая функция помогает в обнаружении нужного объекта, а также позволяет пользователю давать инструкции, перемещая ее/его голову к цели. Вторая помогает в автоматическом обнаружении визуальных целей. Как показано на рис. 3, этот прибор состоит из 2 камер, установленных на шлеме, для видео-входного сигнала, приемник GPS, наушники, микрофон, и прибор Xsens Mti, который отслеживает и воспринимает движение вокруг. Система обрабатывает видеопоток с размером изображения 320 × 240 пикселей, с помощью алгоритма распознавания SpikNet для поиска визуальных объектов.
Для быстрой локализации и обнаружения визуальных целей, в систему интегрирована глобальная позиционная система (GPS), модифицированная географическая информационная система (ГИС) и позиционирование на основе видения.
Из-за отсутствия некоторой информации о согласованности пешеходной мобильности с помощью коммерческих ГИС, эта система сопоставляет сигнал GPS с адаптивной ГИС для оценки текущего положения пользователя. После определения местоположения пользователя и цели агент vision отправляет идентификатор цели и ее трехмерные координаты.
2 ГЛАВА. ПРОЕКТНАЯ ЧАСТЬ
2. 1 Аппаратная часть
2. 1. 1 Структура устройства
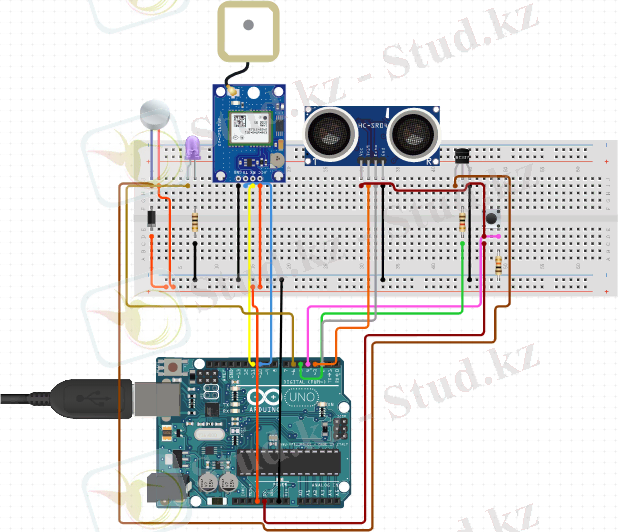
Основные компоненты, необходимые для этого проекта:
1. Arduino UNO R3
2. Линия отслеживания ИК-датчика
3. Полный мост Драйвер двигателя постоянного тока: L298
4. Ультразвуковой датчик HC SR04
5. Зуммер
6. DC Motors
7. Вибрационный мотор
Arduino UNO R3
В качестве основы, которая будет контролировать всю работу
устройства, был выбран микроконтроллер серии Arduino UNO R3, лицевая
часть которого представлена на рисунке 2.
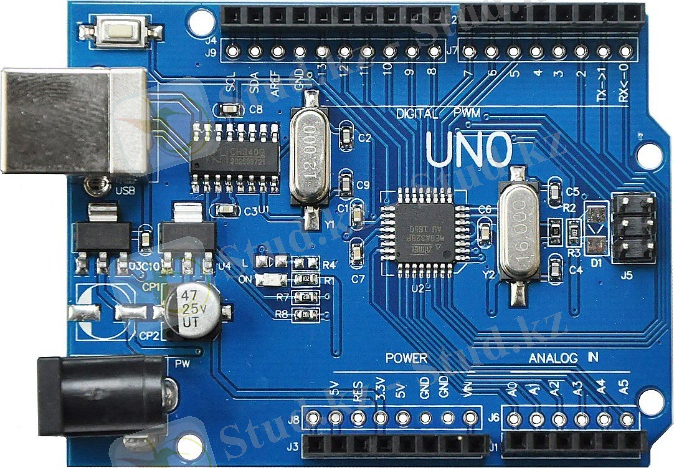
Рисунок 2 - Лицевая сторона Arduino Uno R3
Arduino Uno R3 - устройство на основе микроконтроллера ATmega328. В его состав входит: 14 цифровых входов/выходов под номерами 0-13 (из них 6 могут использоваться в качестве ШИМ-выходов, на плате обозначены со знаком “~”), 6 аналоговых входов A0-A5, кварцевый резонатор на 16 МГц, разъем USB, разъем питания, разъем для внутрисхемного программирования (ICSP) и кнопка сброса. Для начала работы нужно подать питание от AC/DC-адаптера или батарейки, или через USB-кабель от персонального компьютера.
Порт AREF задает опорное напряжение аналоговых входов. Порт IOREF позволяет платам расширения подстраиваться под рабочее напряжение Arduino. Он необходим для совместимости плат расширения как с 5 вольт (В) Arduino на базе микроконтроллеров AVR, так и с 3. 3В платами Arduino Due.
В таблице представлены особенности платы Arduino Uno R3
Таблица 1. Особенности Arduino Uno R3 (ATmega328)
... продолжениеВы можете абсолютно на бесплатной основе полностью просмотреть эту работу через наше приложение.
- Информатика
- Банковское дело
- Оценка бизнеса
- Бухгалтерское дело
- Валеология
- География
- Геология, Геофизика, Геодезия
- Религия
- Общая история
- Журналистика
- Таможенное дело
- История Казахстана
- Финансы
- Законодательство и Право, Криминалистика
- Маркетинг
- Культурология
- Медицина
- Менеджмент
- Нефть, Газ
- Искуство, музыка
- Педагогика
- Психология
- Страхование
- Налоги
- Политология
- Сертификация, стандартизация
- Социология, Демография
- Статистика
- Туризм
- Физика
- Философия
- Химия
- Делопроизводсто
- Экология, Охрана природы, Природопользование
- Экономика
- Литература
- Биология
- Мясо, молочно, вино-водочные продукты
- Земельный кадастр, Недвижимость
- Математика, Геометрия
- Государственное управление
- Архивное дело
- Полиграфия
- Горное дело
- Языковедение, Филология
- Исторические личности
- Автоматизация, Техника
- Экономическая география
- Международные отношения
- ОБЖ (Основы безопасности жизнедеятельности), Защита труда
