Разработка учебного стенда для исследования сети Интернета вещей на основе технологии LoRa/LoRaWAN (868 МГц)

МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РЕСПУБЛИКИ КАЗАХСТАН
АО «МЕЖДУНАРОДНЫЙ УНИВЕРСИТЕТ ИНФОРМАЦИОННЫХ ТЕХНОЛОГИЙ»
ФАКУЛЬТЕТ ИНФОРМАЦИОННЫХ ТЕХНОЛОГИЙ
Калбаева У. М.
Разработкаучебного стенда для исследования сети Интернета вещей.
ДИПЛОМНЫЙ ПРОЕКТ
Специальность 5B071900 - «Радиотехника, электроника и телекоммуникации»

Алматы 2019
- МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РЕСПУБЛИКИ КАЗАХСТАН
АО «МЕЖДУНАРОДНЫЙ УНИВЕРСИТЕТ ИНФОРМАЦИОННЫХ ТЕХНОЛОГИЙ»
КАФЕДРА «РАДИОТЕХНИКА, ЭЛЕКТРОНИКА И ТЕЛЕКОММУНИКАЦИИ»
Допущен к защите
Заведующий кафедрой
PhD, ассоц. профессор
«» 2019 г.
.
ДИПЛОМНЫЙ ПРОЕКТ
Разработкаучебного стенда для исследования сети Интернета вещей.
по специальности 5B071900 -«Радиотехника, электроника и телекоммуникации»
гр. РЭТ-1502 У. М. Калбаева
«» 2019 г.
(подпись)
Профессор, к. т. н., академик
Международной Академии связи
А. З. Айтмагамбетов
«» 2019 г.
(подпись)
к. ф-м. н., доцент
И. Н. Федулина
«» 2019 г.
(подпись)
Алматы 2019
АО «Международный Университет Информационных Технологий»
Факультет Информационных Технологий
Кафедра «Радиотехника, электроника и телекоммуникации»
Специальность 5B071900 - «Радиотехника, электроника и
телекоммуникации»
Задание на дипломный проект
Калбаева Улдаулет Мураткызы
Тема проекта:«Разработкаучебного стенда для исследования сети Интернета вещей»
Утверждено приказом №___МУИТ от 2019г.
Срок сдачи студентом законченного проекта: мая 2019 г.
Исходные данные к проекту:Диапазон радиочастот - 868 МГц (нелицензируемый) ; виды модуляции - LoRa; скорость передачи-от 0. 3 до 50 кбит/с; сетевая технология - LoRaWAN.
Содержание расчетно - пояснительной записки перечень подлежащих разработке вопросoв:
1 Аналитический обзор сети интернет вещей
2 Исследования стандартаLoRaWaN
3 Разработка учебного стенда дляИнтернет вещей
4 Расчет экономической эффективности для внедрения сети Интернет вещей
5 Охрана труда и промышленная экология
Лазерный CDдиск с текстом дипломного проекта и приложениями:
1. Пояснительная записка к дипломному проектированию.
2. Презентация.
Консультанты по проекту, с указанием относящихся к ним разделов проекта
Ассоц. профессор, к. э. н.,
Бердыкулова Г. М.
Сениор-лектор, к. б. н.,
Малгаждарова М. К.
Дата выдачи задания .
РуководительА. З. Айтмагамбетов
(подпись)
Задание принял к исполнениюУ. М. Калбаева
(подпись)
Календарный план выполнения дипломного проекта
Студент Калбаева У. М. группа РЭТ-1502К курс 4
Международный Университет Информационных Технологий
(Ф. И. О)
Тема:
(тема дипломного проекта)
Ноябрь
Ноябрь-Декабрь
Составление и представление научному руководителю.
Введение
Глава 1
Глава 2
Глава 3
Глава 4
Глава 5
Заключение
Январь-Февраль
Март-Апрель
15 Апреля
21-25 Января
26 Февраль - 2 Март
2-6 Aпрель
РуководительА. З. Айтмагамбетов
(подпись)
Задание принял к исполнению У. М. Калбаева
(подпись)
Дата выдачи задания «__» 20___
АҢДАТПА
Дипломдық жоба пилотсыз ұшатын аспапқа арналған. Ара қашықтықтан басқарылатын гексакоптер макеті құрастырылған. Жобада шатын аспаптың микроконтроллер, басқару блогыны, координат жүйесі қарастырылған.
АННОТАЦИЯ
В дипломный проект посвящен беспилотному летающему аппарату. Разработан макетдистанционно - . Рассматривается принцип работы микроконтроллера, блока управления, системы координат летательных аппаратов.
SUMMARY
In the degree project it is devoted to the pilotless flying device. The model remotely - the operated flying geksakopter is developed. The principle of operation of the microcontroller, control unit, system of coordinates of aircraft is considered.
ВВЕДЕНИЕ
В настоящее время происходит непрерывный процесс совершенствования авиационного оборудования летательных аппаратов в соответствии с постоянно усложняющимися задачами, решаемыми современными авиационными комплексами. Приборное оборудование является важной составной частью бортового авиационного оборудования летательного аппарата. Оно выполняет задачу получения информации о параметрах, характеризующих пространственное положение и движение летательного аппарата в воздушной среде, работу авиационных двигателей и других систем. Эта информация используется для ручного или автоматического управления полетом, для контроля режимов работы силовых установок (СУ), для выполнения задач полета и обеспечения его безопасности.
В понятие «авиационные приборы» включают различные группы приборов, важнейшими из которых являются пилотажно-навигационные, а также приборы контроля работы силовой установки и других систем самолета. Пилотажно-навигационные приборы, в свою очередь, включают в себя аэрометрические приборы, пилотажные гироскопические приборы, навигационные устройства и системы. В процессе своего развития и совершенствования курсовые и навигационные системы выделились в отдельный класс авиационных приборов и измерительных систем. Показания аэрометрических, пилотажных гироскопических приборов, приборов контроля работы силовых установок непосредственно влияют на безопасность полетов. К ним предъявляются особые требования по надежности выдачи информации в аварийных условиях. Поэтому при создании и совершенствовании этой группы приборов стремятся сделать так, чтобы они сохранили свою самостоятельность и автономность, т. е. чтобы работа каждого из этих приборов не зависела от работы других приборов и систем или чтобы эта зависимость, по крайней мере, была минимальной.
Некоторые авиационные приборы входят в измерительные системы и комплексы, и эта тенденция комплексирования усиливается.
Успешное решение задач, связанных с управлением сложными техническими системами и разработкой новых технологий, во многом определяется уровнем развития информационно-измерительной техники. Сроки внедрения научно-технических достижений в различных отраслях деятельности человека также непосредственно связаны с качеством получаемой и анализируемой информации на этапах разработки и доводки изделий. Качество этой информации приобретает особое значение в авиационной технике, где каждый эксперимент в ходе разработки изделий связан с большими временными и экономическими затратами, а получение полной и достоверной информации об объекте исследований позволяет сократить число испытаний и тем самым сроки внедрения образцов новой техники.
1 ГИПОТЕЗЫ И ЗАКОНЫ АЭРОДИНАМИКИ
1. 1 Строение атмосферы
Атмосфера является средой полета различных летательных аппаратов. Она имеет сложное строение, однако условно ее делят на слои с указанием их особенностей. Наиболее характерными и интересными для авиастроителей имеют слои тропосфера, стратосфера, ионосфера и экзосфера [12 - 15, 19 - 20] .
Тропосфера - часть атмосферы, граничащая с Землей (H = 10 - 17 км), где заметно тепловое излучение земной поверхности, где температура заметно уменьшается с удалением от Земли. В тропосфере образуются облака, дуют ветры, тут находится вся испаренная влага, меняется влажность, температура, направление ветра.
На верхней границе тропосферы температура остается постоянной. Далее по высоте располагается стратосфера. В стратосфере температура почти постоянна (~ до 30 км) . Ветры там имеют постоянные направления и направлены против вращения Земли (происходит расслоение нижних и верхних слоев воздуха вследствие малого сцепления частиц воздуха) .
Ионосфера характеризуется наличием свободных ионов и электронов и непрерывным повышением температуры. Границы ионосферы непостоянны (H ≈ до 200 км) .
Экзосфера не имеет вообще границ. Это переходная зона от земной атмосферы к межпланетному пространству (H = от ~ 500 до 1000 км) . Известно что:
50 % массы атмосферы расположено на высотах 0 - 5, 5 км;
75 % массы атмосферы расположено на высотах 0 - 10 км;
94 % массы атмосферы расположено на высотах 0 - 20 км над уровнем моря.
Масса атмосферы составляет 1/1 массы Земли.
Свойства земной атмосферы и происходящие в ней явления изучает наука, называемая метеорологией. Свойства атмосферы используются нами для измерения высоты и скорости полета. От них зависят условия работы пилотов самолетов, тяга двигателя, подъемная сила самолета. Для устранения усложнений в полете (а то и катастроф) необходимо изучение аномальных явлений в атмосфере.
К аномальным явлениям относятся грозы, горизонтальные и вертикальные порывы ветра, турбулентные движения воздуха. Струйные течения воздуха могут быть со скоростью от 100 до 700 км/ч.
Воздух атмосферы является смесью газов: 78 % азота (N 2 ), 21 % кислорода (O 2 ), 0, 94 % аргона (A 2 ), 0, 03 углекислого газа (CO 2 ), 0, 01 % водорода (H 2 ) 0, 01 % неона (Ne 2 ) 0, 01 % гелия (He 2 ), 1, 2 % пара. На высотах 30 - 50 км имеется озон (O 3 ) . Максимальное его количество находится на высоте ~ 35 км и составляет 0, 00075 %, тогда как у Земли его только 0, 1 %. Фактически воздух состоит из отдельных молекул газов и не является сплошной средой (особенно на больших высотах) .
Для практических целей авиационные науки нуждаются в установлении закона изменения с высотой основных параметров: как плотность, давление, температура воздуха, скорость звука, вязкость. Но эти параметры зависят еще и от времени года и суток, от случайных явлений в природе. При испытаниях приборов, систем и самолетов требуется проводить сравнение результатов в одинаковых условиях. Так возникла необходимость создания условной стандартной атмосферы (СА), являющейся схемой действительной атмосферы, в которой отсутствуют колебания, вызванные метеорологическими или астрономическими факторами.
На параметры стандартной атмосферы действуют государственные стандарты: ГОСТ 4401-81 (Атмосфера стандартная. Параметры), ГОСТ 3295-73 (Таблицы гипсометрические для геопотенциальных высот до 5 м. Параметры), ГОСТ 5212-74 (Таблица аэродинамическая. Динамические давления и температуры торможения воздуха для скорости полета от 10 до 4000 км/ч. Параметры) и др. [31 - 33] . В отличие от стандартной атмосферы существуют атмосферы справочные, учитывающие широту местности и время года.
В стандартной атмосфере принимаются стандартными исходные параметры: ускорение свободного падения g
с
= 9, 80665 м/с
2
; скорость звука a
с
= 340, 294 м/с; средняя длина свободного пробега частиц воздуха l
с
= 66, 328∙10
-9
м; давление P
с
= 101325, 0 Па (760 мм рт. ст. ), температура Кельвина T
с
= 288, 15 К; кинематическая вязкость ν
с
= 14, 607∙10
-6
м
2
/с; динамическая вязкость μ
с
= 17, 894∙10
-6
Па∙с; плотность весовая γ
с
= 1, 2250 кг/м
3
; плотность массовая
 .
.
Закон изменения температуры воздуха на высотах от нуля до 11000 метров над уровнем моря следующий:
 , (1. 1)
, (1. 1)
где T н - абсолютная температура воздуха на высоте Н;
а - температурный градиент, равный 0, 0065 °С/м;
Н - высота над уровнем моря;
Т 0 = 288 °К. Для Н > 11000 м T н = 216, 5 °К = const. Изменение барометрического давления для высот Н < 11000 м:
 , (1. 2)
, (1. 2)
где P н - давление на высоте Н;
P о = 760 мм рт. ст. ;
ν о - весовая плотность (1, 2255 кг/м 3 ) ;
а - температурный градиент (0, 0065 °С/м) .
Важнейшей характеристикой воздуха является его влажность. Относительная влажность может быть определена по формуле
 , (1. 3)
, (1. 3)
где R - относительная влажность;
q - абсолютная влажность - количество пара в граммах, содержащееся в 1 м 3 ;
Q - количество насыщающих паров при данной температуре в г/м 3 .
Предел насыщения воздуха водяными парами в зависимости от температуры приведен в таблице 2. 1.
Таблица 2. 1-Зависимости от температуры
Важно обратить внимание на то, что при понижении температуры воздуха наступает перенасыщение, пар превращается в капли воды [13] . Самолетостроители и разработчики приборов и систем должны это учитывать в своей практике. В связи с этим явлением внутри самолета накапливается большое количество воды, которая пагубно влияет на работоспособность техники.
1. 5 Подъемная сила. Теорема Николая Егоровича Жуковского
На рисунке 1. 5 представлено крыло в потоке воздуха, расположенное к оси потока под углом атаки α. Здесь Y - подъемная сила, Q - лобовое сопротивление, которое в 20 - 25 раз меньше подъемной силы Y.
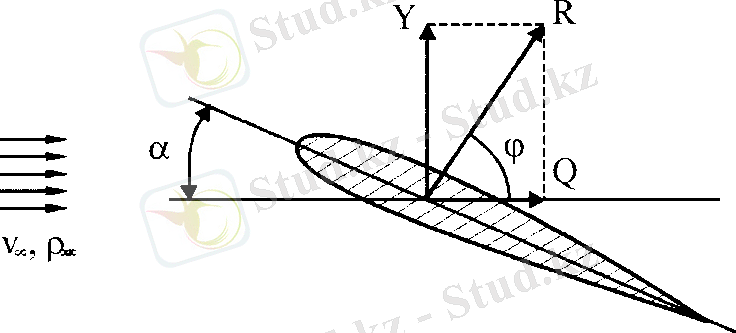
Рисунок 1. 5. Крыло в потоке воздуха
В 1906 году Н. Е. Жуковский для крыла бесконечного размаха доказал теорему о том, что на такое тело (при наличии циркуляции Г вокруг него) действует подъемная сила Y. Закон основан на применении закона количества движения к массам жидкости, обтекающего крыло.
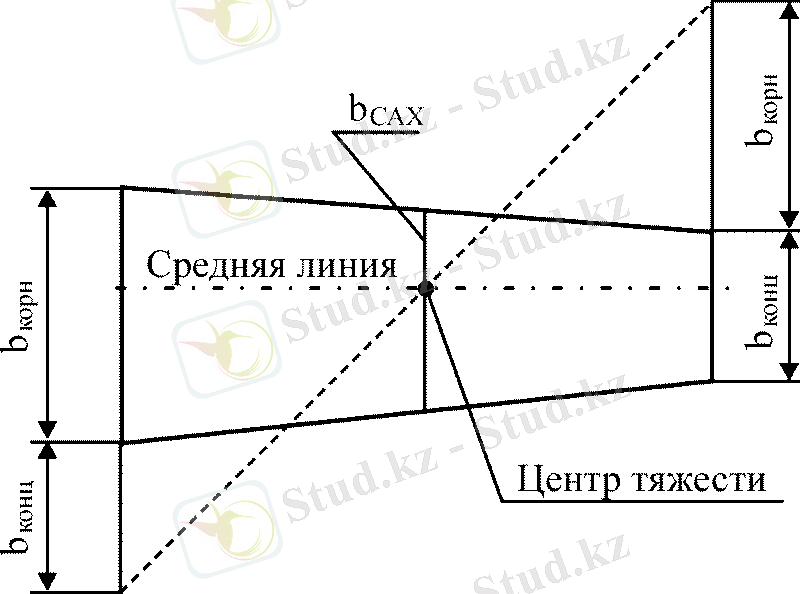
Рисунок 1. 6. Геометрические характеристики крыла: b корн - корневая хорда; b конц - концевая хорда; b САХ - средняя аэродинамическая хорда
Н. Е. Жуковский рассматривал крыло бесконечного размаха, у которого отношения корневой хорды (b корн ) к концевой хорде (b конц ) равно бесконечности, то есть при b конц ≈ 0 или: b корн / b конц ≈ ∞ [17, 18, 20, 21] .
Теорема Жуковского формулируется следующим образом: если поток, имеющий в бесконечности скорость v ∞ и плотность ρ ∞ , обтекает цилиндрическое тело (крыло) и циркуляция скорости вокруг этого тела равна Г, то на тело со стороны жидкости будет действовать сила Y, перпендикулярная направлению скорости v ∞ и равная произведению циркуляции на плотность и скорость потока в бесконечности [17] .
Математически теорема Жуковского может быть записана формулой:
 , (1. 15)
, (1. 15)
где l - длина части крыла бесконечного размаха, подъемную силу которой хотят определить.
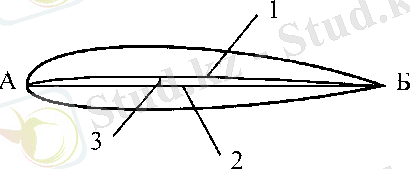
Рисунок 1. 7. Геометрические параметры профиля крыла: 1 - средняя линия; 2 - хорда; 3 - кривизна абсолютная
Величина циркуляции была предложена Жуковским в виде
 , (1. 16)
, (1. 16)
где b - хорда профиля крыла,
α - угол атаки крыла в радианах,
 - относительная кривизна профиля крыла (т. е. отношение кривизны к хорде) .
- относительная кривизна профиля крыла (т. е. отношение кривизны к хорде) .
Подставив последнее выражение (1. 16) в предыдущее (1. 15) получим:
 , (1. 17)
, (1. 17)
Положив bl = S (площадь крыла),
 в радианах, с учетом того, что суммарный угол
в радианах, с учетом того, что суммарный угол
 обычно не превышает 15˚ ≈ 0, 26 радиана, будем иметь:
обычно не превышает 15˚ ≈ 0, 26 радиана, будем иметь:
 , (1. 18)
, (1. 18)
Как показала дальнейшая практика определения подъемной силы, выведенная теоретическая зависимость не полностью отражает действительность. Связано это с тем, что при выводе не был учтен пограничный слой вокруг крыла. В начале зарождения теории полета практика обгоняла теорию.
Как уже было сказано, для продувок аэродинамических тел в авиации служат аэродинамические трубы, в которых определяются реальные характеристики, в том числе и подъемные силы и силы лобового сопротивления конкретных тел.
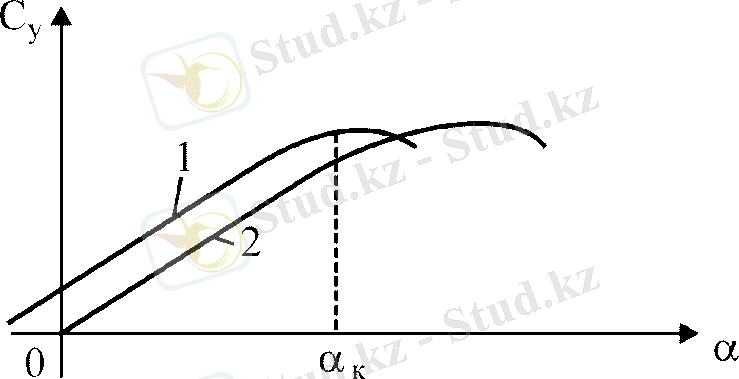
Рисуноу 1. 8. График зависимости безразмерного коэффициента подъемной силы С у от угла атаки α: 1 - несимметричное тело; 2 - симметричное тело
На рисунке 1. 8 приведена зависимость коэффициента подъемной силы С у от угла атаки. Практически подъемная сила определяется по формуле
 . (1. 19)
. (1. 19)
Коэффициент
 и зависит от многих конструктивных параметров обтекаемого тела (крыла) :
и зависит от многих конструктивных параметров обтекаемого тела (крыла) :
 , (1. 20)
, (1. 20)
где λ - удлинение крыла,
λ = l 2 /S; l - длина крыла;
S - площадь крыла;
η - сужение крыла,
η = b корн / b конц , b корн - корневая хорда,
b конц - концевая хорда крыла;
χ - стреловидность крыла;
М - число Маха;
- относительная кривизна крыла.
Для крыла с большим удлинением (λ>2) и сужением (крыло бесконечного удлинения) все перечисленные параметры имеют существенное влияние на величину коэффициента
 . Однако для крыла с малым удлинением коэффициент
в основном зависит от удлинения. При этом малым удлинением считается величина
. Однако для крыла с малым удлинением коэффициент
в основном зависит от удлинения. При этом малым удлинением считается величина
 .
.
У крыльев бесконечного размаха по опытным данным коэффициент
 1/град ≈ 5, 7 1/радиан. Для крыльев конечного размаха этот коэффициент меньше. Зная значение
1/град ≈ 5, 7 1/радиан. Для крыльев конечного размаха этот коэффициент меньше. Зная значение
 можно теоретически определить значение коэффициента подъемной силы для любого удлинения:
можно теоретически определить значение коэффициента подъемной силы для любого удлинения:
 , (1. 21
, (1. 21
)
где τ - поправочный коэффициент, равный τ ≈ 0, 18.
Для точного определения значения всех коэффициентов крыло продувается в аэродинамической трубе.
Для крыла малого удлинения типа флюгарки коэффициент
имеет следующую зависимость при М < 1:
 . (1. 22)
. (1. 22)
В таблице 1. 3 со звездочкой приведены практические значения
, а без звездочки по формуле (1. 22) .
Таблица 1. 3-Практические значения
, рад
Формула пересчета (1. 21) мало пригодна для крыльев с малым удлинением, но хорошо приемлема для крыльев с большим удлинением (λ > 2) . У крыльев с малым удлинением коэффициент
значительно меньше коэффициента крыла с большим удлинением.
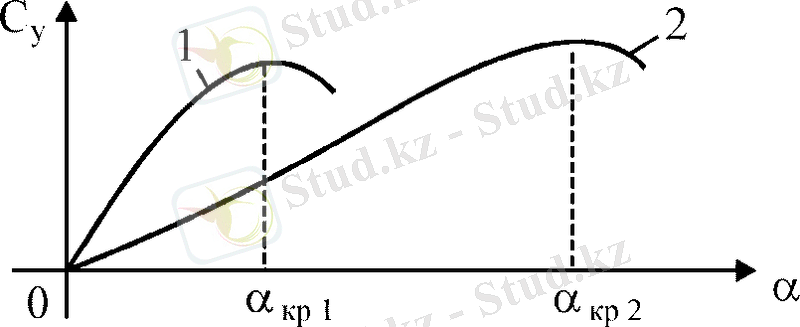
Рисунок 1. 9. Сравнение кривых С у (α) пластин больших и малых удлинений: 1 - λ > 2; 2 - λ < 2
Теорема Жуковского явилась основой теории полета и аэродинамики крыла. Она отвечает на вопрос: "Почему самолет летает?" Теорема Жуковского вместе с гипотезой о неразрывности движения потока объясняет принцип образования подъемной силы крыла самолета, особенности восприятия статического давления в ПВД и др.
На рисунке 1. 10 показано крыло в потоке воздуха. Показано, что под крылом давление больше по сравнению с давлением над профилем крыла. Струи воздуха чтобы соединится в одной точке (разрыв не допустим) после прохождения крыла должны двигаться с разными скоростями, так как их пути следования разные. Верхний слой движется с большей скоростью, а значит давление над крылом меньше давления под крылом. Разность давления, умноженная на площадь крыла, создает подъемную силу.
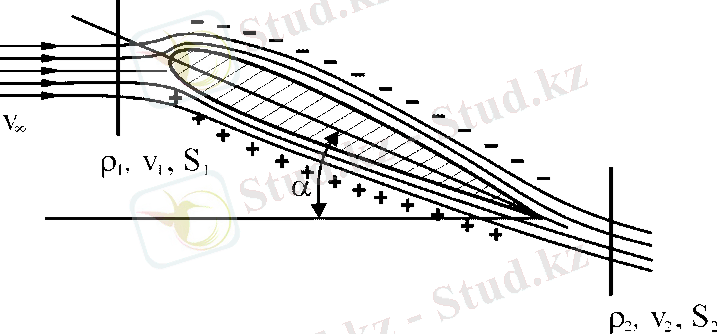
Рисунок 1. 10. Характер обтекания крыла в потоке воздуха, установленного под углом атаки α к потоку: - - - давление над крылом; + + + + - давление под крылом
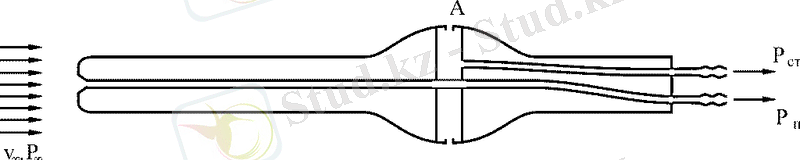
Рисунок 1. 11. Гофрированное тело в потоке воздуха
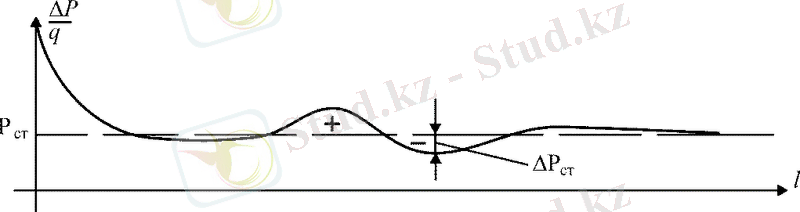
Рисунок 1. 12. Распределение избыточного давления по поверхности гофрированного тела в потоке воздуха
На переднем участке, на гладком цилиндре используется принцип Пито, когда в лобовом отверстии воспринимается полное давление Р п , а на гладких параллельных потоку стенках прибора с отверстиями воспринимается статическое давление Р ст .
Эффект ребристой поверхности используется в авиаприборостроении для компенсации погрешностей восприятия статического давления при помощи ПВД.
Например, если в месте установления ПВД на самолете погрешность имеет плюсовой знак, то для компенсации ее нужно взять статическое давление от камеры А с отрицательной погрешностью.
Это же явление используется для повышения чувствительности измерителя приборной скорости. И в этом случае статическое давление нужно взять в камере А. Тогда динамическое давление
 сформируется следующим образом:
сформируется следующим образом:
 (1. 23)
(1. 23)
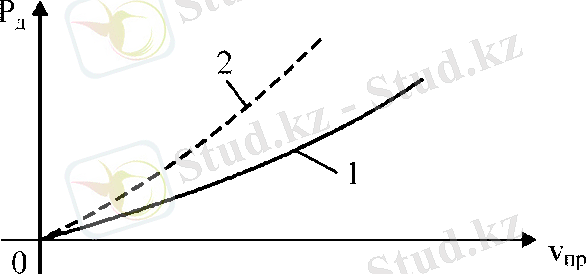
Рис. 2. 13. График динамического давления в зависимости от скорости:
1 - кривая до компенсации; 2 - кривая после компенсации с помощью гофрированного тела
На графике 1. 13 видно, что новая кривая 2 круче стандартной кривой 1.
Идеально шар в потоке не имеет подъемной силы, если он не вращается. Стоит его закрутить, как появляется подъемная сила.
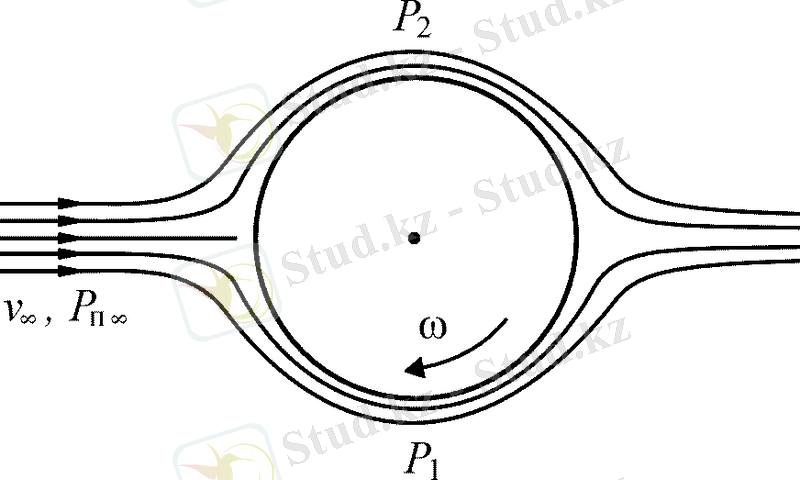
Рисунок 1. 14. Шар в потоке воздуха
При вращении ω шар будет иметь подъемную силу, так как Р 1 > Р 2 . Это объясняется тем, что в верхней точке движение потока ускоряется, а в нижней точке замедляется.
... продолжениеВы можете абсолютно на бесплатной основе полностью просмотреть эту работу через наше приложение.
- Информатика
- Банковское дело
- Оценка бизнеса
- Бухгалтерское дело
- Валеология
- География
- Геология, Геофизика, Геодезия
- Религия
- Общая история
- Журналистика
- Таможенное дело
- История Казахстана
- Финансы
- Законодательство и Право, Криминалистика
- Маркетинг
- Культурология
- Медицина
- Менеджмент
- Нефть, Газ
- Искуство, музыка
- Педагогика
- Психология
- Страхование
- Налоги
- Политология
- Сертификация, стандартизация
- Социология, Демография
- Статистика
- Туризм
- Физика
- Философия
- Химия
- Делопроизводсто
- Экология, Охрана природы, Природопользование
- Экономика
- Литература
- Биология
- Мясо, молочно, вино-водочные продукты
- Земельный кадастр, Недвижимость
- Математика, Геометрия
- Государственное управление
- Архивное дело
- Полиграфия
- Горное дело
- Языковедение, Филология
- Исторические личности
- Автоматизация, Техника
- Экономическая география
- Международные отношения
- ОБЖ (Основы безопасности жизнедеятельности), Защита труда
