Разработка устройств на основе Arduino: кодовый замок и электронный счётчик людей

МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РЕСПУБЛИКИ КАЗАХСТАН
АО «МЕЖДУНАРОДНЫЙ УНИВЕРСИТЕТ ИНФОРМАЦИОННЫХ ТЕХНОЛОГИЙ»
ФАКУЛЬТЕТ ИНФОРМАЦИОННЫХ ТЕХНОЛОГИЙ
Ансабаев Т. А
Разработка устройств на основе ARDUINO
ДИПЛОМНЫЙ ПРОЕКТ
Специальность 5B071900 - «Радиотехника, электроника и телекоммуникации»
Алматы 2019
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РЕСПУБЛИКИ КАЗАХСТАН
АО «МЕЖДУНАРОДНЫЙ УНИВЕРСИТЕТ ИНФОРМАЦИОННЫХ ТЕХНОЛОГИЙ»
КАФЕДРА «РАДИОТЕХНИКА, ЭЛЕКТРОНИКА И ТЕЛЕКОММУНИКАЦИИ»
Допущен к защите:
Заведующий кафедрой
PhD, ассист. профессор
Е. А. Дайнеко
«» 2019г.
ДИПЛОМНЫЙ ПРОЕКТ
Тема проекта: Разработка устройств на основе ARDUINO
Кодовый замок на основе Arduino
по специальности 5B071900 - «Радиотехника, электроника и телекоммуникации»
гр. РЭТ-1501 Т. А. Ансабаев
«» 2019 г.
(подпись)
Сениор-лектор С. П. Луганская
«» 2019 г.
(подпись)
Доцент. кафедры «Радиотехника и телекоммуникации» «КазАТК им М. Тынышпаева» PhD, А. К. Оразымбетова
«» 2019 г.
Алматы 2019
АО «Международный Университет Информационных Технологий»
Факультет Информационных Технологий
Кафедра «Радиотехника, Электроника и Телекоммуникации»
Специальность 5B071900 - «Радиотехника, электроника и телекоммуникации»
Задание на дипломный проект
Ансабаев Тынысбек Асхатович
Тема проекта: «Разработка устройств на основе ARDUINO»
Утверждено приказом № МУИТ от «__» 201__ г.
Срок сдачи студентом законченного проекта «1» июля 2019 г.
Исходные данные к проекту: светодиод - 2 В, arduino - uno, резистор - 100 кОм, микроконтроллер - 1, кнопки - 2, панель с контактными гнездами - 1, пьезопреобразователь звука - 1,
Содержание расчетно - пояснительной записки перечень подлежащих разработке вопросoв:
1. Общие сведения о микроконтроллерах
2. Электронные компоненты и их свойства
3. Конструкторская часть
4. Экономическое обоснование дипломного проекта
5. Охрана труда и промышленной экологий
Лазерный CD диск с текстом дипломного проекта и приложениями:
1. Пояснительная записка к дипломному проектированию.
2. Презентация.
Консультанты по проекту, с указанием относящихся к ним разделов проекта
и. о. профессор, к. э. н.,
Бердыкулова Г. М.
Ассистент-
профессор, PhD
Малгаждарова М. К.
Дата выдачи задания: «» 2018 г.
Руководитель С. П. Луганская
(подпись)
Задание принял к исполнениюА. Т. Ансабаев
(подпись)
Календарный план выполнения дипломного проекта
Студент группа курс
Международный Университет Информационных Технологий
(Ф. И. О)
Тема:
(тема дипломного проекта)
Составление и представление научному руководителю.
Введение
Глава 1
Глава 2
Глава 3
Глава 4
Глава 5
Заключение
21-25 Января
5-16 Февраля,
1-5 Апреля
8-12 Апреля,
13-17 Мая
20-23 Мая
Руководитель С. П. Луганская
(подпись)
Задание принял к исполнению Т. А. Ансабаев
(подпись)
Дата выдачи задания «___» 2019
АҢДАТПА
Бұл дипломдық жобада келесі талаптарды ескере отырып, микроконтроллердегі адамдарды электронды есептеу құрылғысын әзірлеу қарастырылады:
-схеманың қарапайымдылығы (компоненттердің ең аз саны) ;
-функционалдық қанықтығы, реттелетін параметрлердің алуан түрлілігі;
-желілік кернеудің броскаларына төзімділік, ұзақ уақыт;
-төмен энергия тұтыну.
Дипломдық жоба 5 тараудан тұрады.
Бірінші тарауда оқу құрылғысының жұмысын талдау қарастырылады.
Екінші тарау элементтік базаны таңдауға, сипаттауға және есептеуге, микроконтроллердің бағдарламалық қамтамасыз етілуін әзірлеуге арналған.
Үшінші бөлімде құрылғыны әзірлеу жүргізіледі: аппараттық құралдар мен бағдарламалық жасақтаманы әзірлеу және баптау.
Төртінші тарау құрылғыны әзірлеу шығындары есептелген экономикалық есептеулерге арналған.
Бесінші тарау еңбекті қорғау мен қоршаған ортаның экологиясын қарастырады. Бұл бөлімде жарықтандыру және бөлмедегі микроклимат, жұмыс орнына эргономикалық талаптар қарастырылған.
Дипломдық жоба 74 бет, 15 сурет, 10 кесте, 15 әдебиет көздерінен турады.
Түйінді сөздер: ARDUINO UNO, Atmega16 микроконтроллері, сенсор, дисплей, индикатор
АННОТАЦИЯ
В данном дипломном проекте рассматривается разработка устройства электронного подсчета людей на микроконтроллере, с учётом следующих требований:
- простота схемы (минимальное количество компонентов) ;
- функциональная насыщенность, многообразие регулируемых параметров;
- устойчивость к броскам сетевого напряжения, долговечность;
- низкое энергопотребление.
Дипломный проект состоит из 5-ти глав.
В первой главе рассматривается анализ работы считывающего устройства.
Вторая глава посвящена выбору, описанию и расчету элементной базы, разработке программного обеспечения микроконтроллера.
В третьем разделе проводится разработка устройства: разработка и отладка аппаратных средств и программного обеспечения.
Четвертая глава посвящена экономическим расчетам, где рассчитаны расходы на разработку устройства.
Пятая глава рассматривает охрану труда и экологию окружающей среды. В этой главе рассмотрены вопросы освещения и микроклимата в помещении, эргономические требования к рабочему месту.
Дипломный проект содержит: 74 страниц, 15 рисунков, 10 таблицы, 15 источников литературы.
Ключевые слова: ARDUINO UNO, микроконтроллер Atmega16, сенсор, дисплей, индикатор
ABSTRACT
In this diploma project is considered the development of electronic counting device people on the microcontroller, taking into account the following requirements:
- simplicity of the scheme (minimum number of components) ;
- functional richness, the diversity of adjustable parameters;
- resistance to mains voltage surges, durability;
- low power consumption.
The graduation project consists of 5 chapters.
The first Chapter discusses the analysis of the reader.
The second Chapter is devoted to the selection, description and calculation of the element base, the development of software microcontroller.
The third section is the development of the device: development and debugging of hardware and software.
The fourth Chapter is devoted to economic calculations, which calculated the cost of developing the device.
The fifth Chapter deals with health and environmental protection. This Сhapter discusses the issues of lighting and microclimate in the room, ergonomic requirements for the workplace.
Diploma project contains: 74 pages, 15 figures, 10 tables, 15 sources of literature.
Keywords: ARDUINO UNO, microcontroller Atmega16, sensor, display, indicator
СОДЕРЖАНИЕ
ОБОЗНАЧЕНИЯ И СОКРАЩЕНИЯ
В данной работе были использованы следующие обозначения и сокращения:
ИК - Инфракрасный контроль;
ПП - Полупроводниковый диод;
ПЗУ - постоянные запоминающие устройства;
ОЗУ - оперативные запоминающие устройство;
ШИМ - широтно-импульсная модуляция;
ADS - протокол для пиринговых сетей;
АЦП - Аналого-цифровой преобразователь;
АЛУ - арифметико-логическое устройство;
EEPROM - электрически стираемое программируемое постоянное запоминающее устройство;
AGND - аналоговая земля;
DGND - цифровая земля;
МИС - монолитная интегральная схема ;
ППМ - приемопередающий модуль;
ППР - приемник предупреждения радара;
ПК - персональный компьютер
ВВЕДЕНИЕ
Кодовые замки являются эффективным средством предотвращения доступа посторонних лиц к охраняемым помещениям. К их достоинствам можно отнести простоту в обращении, надёжность, возможность обеспечить высокую степень защиты, относительную лёгкость смены кода (по сравнению со сменой обычного механического замка) . Также немаловажными являются отсутствие необходимости изготовления ключей при предоставлении доступа большому количеству людей и невозможность физической потери ключа. Недостатком таких систем можно назвать возможность для злоумышленника подсмотреть код или подобрать его. Однако, при большой разрядности кода или наличии конструктивных особенностей, препятствующих подбору кода, таких как ограничение количества попыток или введение временной задержки между неудачными попытками, эта задача сильно затрудняется, поэтому последний недостаток нельзя назвать существенным. В данном курсовом проекте осуществляется разработка электронного кодового замка для наружной двери жилого дома с использованием микроконтроллера. Одним из требований является осуществление сигнализации при попытке подбора кода.
Рассмотрим специфику данной задачи. Кодовый замок должен обеспечивать управление исполнительным устройством электромеханического замка, то есть должен управлять подачей напряжения, обеспечивающего отпирание двери. Предполагается, что замок открывается наличием напряжения на исполнительном устройстве и закрывается его отсутствием. Поэтому в системе должен присутствовать датчик открытия двери, чтобы можно было определить, когда дверь открыта, и подача питания уже не требуется.
Когда пользователь вводит верный код, он должен быть извещён о том, что замок открыт, и дверь можно открывать, то есть должна присутствовать индикация факта открытия замка.
При последовательных попытках подбора кода замка жителям дома будет полезно узнать об этом, будь то злоумышленник, пытающийся проникнуть в помещение или жилец, который забыл или не в состоянии набрать верный код. Таким образом, система должна сигнализировать о попытке подбора кода после определённого числа неудачных попыток.
Кодовый замок представляет собой систему, отказ или сбои в работе которой могут привести к возникновению серьёзных трудностей и неудобств у владельца охраняемого помещения, поэтому система должна быть надёжной и обеспечивать стабильную работу.
Учитывая то, что замок устанавливается на наружной двери дома, он должен быть способен функционировать в широком диапазоне температур.
1 ОБЩИЕ СВЕДЕНИЯ О МИКРОКОНТРОЛЛЕРАХ
Перед тем как начать работать с аппаратной вычислительной платформой Arduino, важно получить общие сведения о микроконтроллерах. Микроконтроллеры применяются, прежде всего, для автоматизации в метрологии, технике управления и автоматического регулирования. Преимущество микроконтроллеров состоит в том, что можно эффективно и с малыми затратами измерять и интерпретировать физические величины, чтобы потом принимать требуемые решения и выполнять необходимые действия.
В процессе миниатюризации функциональные блоки, которые в обычных компьютерных системах размещались в отдельных интегральных схемах (процессор, память, порты ввода / вывода, таймеры, контроллеры прерываний и пр. ) стали объединять на одном кристалле. Так появились микроконтроллеры или, как их принято называть в отечественной литературе, однокристальные ЭВМ. Такой подход позволил значительно сократить не только размеры встроенных систем, но также сложность и сроки их разработки, а следовательно и стоимость. Сокращение числа компонентов повлекло за собой повышение надежности готовых устройств. В некоторых случаях для построения полноценной встроенной системы достаточно одной микросхемы - микроконтроллера.
Основные требования, которые потребители предъявляют к управляющим блокам приборов (микроконтроллерам) можно сформулировать следующим образом:
низкая стоимость,
- высокая надежность,
- высокая степень миниатюризации,
- малое энергопотребление,
- работоспособность в жестких условиях эксплуатации;
- достаточная производительность для выполнения всех требуемых функций.
В отличие от универсальных компьютеров к управляющим контроллерам, как правило, не предъявляются высокие требования к производительности и программной совместимости. Выполнение всех этих довольно противоречивых условий одновременно затруднительно, поэтому развитие и совершенствование техники пошло по пути специализации и в настоящее время количество различных моделей управляющих микроконтроллеров чрезвычайно велико.
- Структура и принцип работы МК
Контроллер представляет собой, по сути, микрокомпьютер и содержит все присущие ему основные модули (См. рис. 1. 1) . Стандартные блоки каждого микроконтроллера - это центральный процессор (CPU), оперативная память (RAM), а также память программ (Flash-память) и внешние устройства.
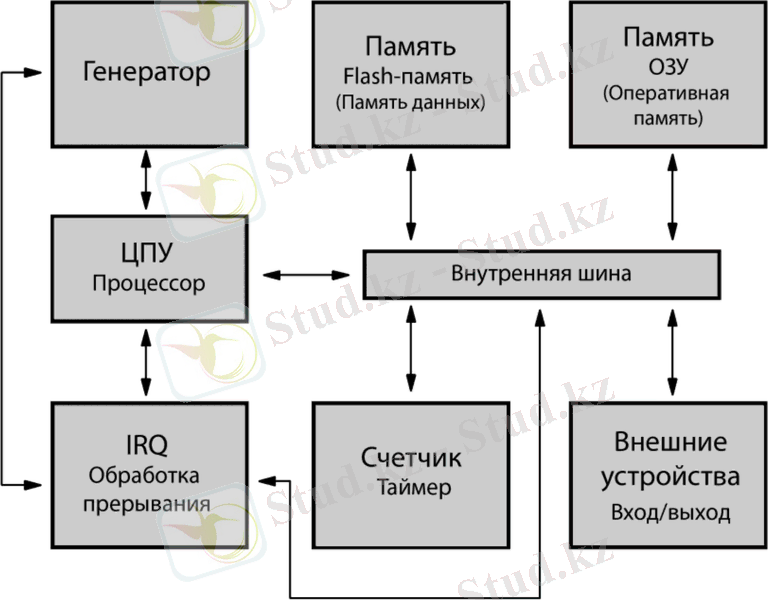
Рисунок 1. 1- Упрощенная структура микроконтроллера
В настоящее время выпускается целый ряд типов МК. Все эти приборы можно условно разделить на три основных класса:
- 8-разрядные МК для встраиваемых приложений;
- 16- и 32-разрядные МК;
- цифровые сигнальные процессоры (DSP) .
Наиболее распространенным представителем семейства МК являются 8-разрядные приборы, широко используемые в промышленности, бытовой и компьютерной технике. Они прошли в своем развитии путь от простейших приборов с относительно слаборазвитой периферией до современных многофункциональных контроллеров, обеспечивающих реализацию сложных алгоритмов управления в реальном масштабе времени. Причиной жизнеспособности 8-разрядных МК является использование их для управления реальными объектами, где применяются, в основном, алгоритмы с преобладанием логических операций, скорость обработки которых практически не зависит от разрядности процессора.
Росту популярности 8-разрядных МК способствует постоянное расширение номенклатуры изделий, выпускаемых такими известными фирмами, как Motorola, Microchip, Intel, Zilog, Atmel и многими другими. Современные 8-разрядные МК обладают, как правило, рядом отличительных признаков. Перечислим основные из них:
- модульная организация, при которой на базе одного процессорного ядра (центрального процессора) проектируется ряд (линейка) МК, различающихся объемом и типом памяти программ, объемом памяти данных, набором периферийных модулей, частотой синхронизации;
- использование закрытой архитектуры МК, которая характеризуется отсутствием линий магистралей адреса и данных на выводах корпуса МК. Таким образом, МК представляет собой законченную систему обработки данных, наращивание возможностей которой с использованием параллельных магистралей адреса и данных не предполагается;
- использование типовых функциональных периферийных модулей (таймеры, процессоры событий, контроллеры последовательных интерфейсов, аналого-цифровые преобразователи и др. ), имеющих незначительные отличия в алгоритмах работы в МК различных производителей;
- расширение числа режимов работы периферийных модулей, которые задаются в процессе инициализации регистров специальных функций МК.
При модульном принципе построения все МК одного семейства содержат процессорное ядро, одинаковое для всех МК данного семейства, и изменяемый функциональный блок, который отличает МК разных моделей. Структура модульного МК приведена на рисунке 1. 2.
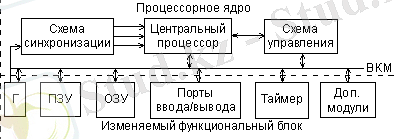
Рисунок 1. 2 - Модульная организация микроконтроллера.
Процессорное ядро включает в себя:
- центральный процессор;
- внутреннюю контроллерную магистраль (ВКМ) в составе шин адреса, данных и управления;
- схему синхронизации МК;
- схему управления режимами работы МК, включая поддержку режимов пониженного энергопотребления, начального запуска (сброса) и т. д.
Изменяемый функциональный блок включает в себя модули памяти различного типа и объема, порты ввода/вывода, модули тактовых генераторов (Г), таймеры. В относительно простых МК модуль обработки прерываний входит в состав процессорного ядра. В более сложных МК он представляет собой отдельный модуль с развитыми возможностями. В состав изменяемого функционального блока могут входить и такие дополнительные модули как компараторы напряжения, аналого-цифровые преобразователи (АЦП) и другие. Каждый модуль проектируется для работы в составе МК с учетом протокола ВКМ. Данный подход позволяет создавать разнообразные по структуре МК в пределах одного семейства.
- Процессорное ядро микроконтроллера
Структура процессорного ядра МК
Основными характеристиками, определяющими производительность процессорного ядра МК, являются:
- набор регистров для хранения промежуточных данных;
- система команд процессора;
- способы адресации операндов в пространстве памяти;
- организация процессов выборки и исполнения команды.
С точки зрения системы команд и способов адресации операндов процессорное ядро современных 8-разрядных МК реализует один из двух принципов построения процессоров:
- процессоры с CISC-архитектурой, реализующие так называемую полную систему команд (Complicated Instruction Set Computer) ;
- процессоры с RISC-архитектурой, реализующие сокращенную систему команд (Reduced Instruction Set Computer) .
CISC-процессоры выполняют большой набор команд с развитыми возможностями адресации, давая разработчику возможность выбрать наиболее подходящую команду для выполнения необходимой операции. В применении к 8-разрядным МК процессор с CISC-архитектурой может иметь однобайтовый, двухбайтовый и трехбайтовый (редко четырехбайтовый) формат команд. Время выполнения команды может составлять от 1 до 12 циклов. К МК с CISC-архитектурой относятся МК фирмы Intel с ядром MCS-51, которые поддерживаются в настоящее время целым рядом производителей, МК семейств НС05, НС08 и НС11 фирмы Motorola и ряд других.
В процессорах с RISC-архитектурой набор исполняемых команд сокращен до минимума. Для реализации более сложных операций приходится комбинировать команды. При этом все команды имеют формат фиксированной длины (например, 12, 14 или 16 бит), выборка команды из памяти и ее исполнение осуществляется за один цикл (такт) синхронизации. Система команд RISC-процессора предполагает возможность равноправного использования всех регистров процессора. Это обеспечивает дополнительную гибкость при выполнении ряда операций. К МК с RISC-процессором относятся МК AVR фирмы Atmel, МК PIC16 и PIC17 фирмы Microchip и другие.
На первый взгляд, МК с RISC-процессором должны иметь более высокую производительность по сравнению с CISC МК при одной и той же тактовой частоте внутренней магистрали. Однако на практике вопрос о производительности более сложен и неоднозначен.
С точки зрения организации процессов выборки и исполнения команды в современных 8-разрядных МК применяется одна из двух уже упоминавшихся архитектур МПС: фон-неймановская (принстонская) или гарвардская.
... продолжениеВы можете абсолютно на бесплатной основе полностью просмотреть эту работу через наше приложение.
- Информатика
- Банковское дело
- Оценка бизнеса
- Бухгалтерское дело
- Валеология
- География
- Геология, Геофизика, Геодезия
- Религия
- Общая история
- Журналистика
- Таможенное дело
- История Казахстана
- Финансы
- Законодательство и Право, Криминалистика
- Маркетинг
- Культурология
- Медицина
- Менеджмент
- Нефть, Газ
- Искуство, музыка
- Педагогика
- Психология
- Страхование
- Налоги
- Политология
- Сертификация, стандартизация
- Социология, Демография
- Статистика
- Туризм
- Физика
- Философия
- Химия
- Делопроизводсто
- Экология, Охрана природы, Природопользование
- Экономика
- Литература
- Биология
- Мясо, молочно, вино-водочные продукты
- Земельный кадастр, Недвижимость
- Математика, Геометрия
- Государственное управление
- Архивное дело
- Полиграфия
- Горное дело
- Языковедение, Филология
- Исторические личности
- Автоматизация, Техника
- Экономическая география
- Международные отношения
- ОБЖ (Основы безопасности жизнедеятельности), Защита труда
