Техническое обслуживание, ремонт и расчёт асинхронных электродвигателей

СОДЕРЖАНИЕ
ВВЕДЕНИЕ . . . 3
І. ОБЗОРНАЯ ЧАСТЬ . . . 5
1. 1 Основные типы и классификация электрических машин . . . 5
1. 2 Устройство и принцип действия асинхронного двигателя . . . 15
1. 2. 1 Устройство асинхронных двигателей . . . 15
1. 2. 2 Степени защиты асинхронных двигателей . . . 18
1. 2. 3 Принцип действия трехфазного асинхронного двигателя . . . 19
1. 2. 4 Принцип действия короткозамкнутый ротор асинхронного двигателя . . . 21
ІІ. Технологическая часть . . . 26
2. 1 Ремонт асинхронного электродвигателя . . . 26
2. 2 Разборка электродвигателя . . . 27
2. 3 Дефектация асинхронного двигателя . . . 29
2. 4 Сушка асинхронного электродвигателя . . . 33
2. 5 Подготовка асинхронного электродвигателя к работе . . . 34
ІІІ. Общая расчетная часть дипломного проекта . . . 38
3. 1 Выбор главных размеров . . . 38
3. 2 Расчет обмотки статора . . . 39
3. 3 Расчет размеров зубцовой зоны статора и воздушного зазора . . . 40
3. 4 Расчет ротора . . . 42
3. 5 Расчет потерь . . . 46
3. 6 Расчет рабочих характеристик . . . 47
3. 7 Механический расчет . . . 51
IV. ТЕХНИЧЕСКОЕ ОБСЛУЖИВАНИЕ И РЕМОНТ ЭЛЕКТРИЧЕСКИХ МАШИН . . . 59
4. 1. Объем работ по техническому обслуживанию и ремонту . . . 59
4. 2 Основные требования к установке подшипников качения . . . 65
4. 3 Технология ремонта узлов и деталей электрических машин . . . 67
4. 4 Технологический процесс полной перемотки статора асинхронного электродвигателя . . . 68
V. Техника безопасности при ремонте электродвигателями . . . 71
ЗАКЛЮЧЕНИЕ . . . 73
СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ . . . 76
ВВЕДЕНИЕ
Асинхронные двигатели являются основными преобразователями электрической энергии в механическую и составляют основу электропривода большинства механизмов, используемых во всех производствах.
Асинхронные двигатели общего назначения мощностью от 0, 06 до 400кВт на напряжение до 1140В - наиболее широко применяемые электрические машины. При проектировании необходимо учитывать соответствие технико-экономических показателей современному мировому уровню при соблюдении требований государственных и отраслевых стандартов. Приходится также учитывать назначение и условия эксплуатации, стоимость активных и конструктивных материалов КПД, технологию производства, надежность в работе и патентную частоту.
Расчет и конструирование неотделимы от технологии их изготовления. Поэтому при проектировании необходимо учитывать возможности электротехнических заводов, стремиться к максимальному снижению трудоемкости изготовления электрических машин.
В дипломной работе приведены технические данные по электрическим машинам как общего, так и специального назначения, широко применяемым в современном электроприводе. Рассмотрены вопросы технического обслуживания и техники безопасности при эксплуатации электрических машин.
В дипломной работе рассматривается теория одного из вида электрических машин - синхронный двигатель, его характеристики, устройство, переходные и установившиеся режимы работы. Теория электрических машин излагается на базе дифференциальных уравнений. Максимально используются современные достижения общей теории электрических машин; развивается классическая теория комплексных уравнений, векторных диаграмм и схем замещения.
Целью дипломной работы является изучение основных организационных и технических положений по обслуживанию и ремонту асинхронной двигателей.
В процессе изучения ставятся следующие задачи:
1. Дать общее представление об асинхронной двигателях;
2. Рассмотреть синхронный двигатель и его назначение;
3. Рассмотреть особенности испытаний асинхронных машин;
4. Изучить технические условия ремонта и обслуживания электрических машин (асинхронного двигателя) ;
5. Определить меры по технике безопасности при ремонте электрических машин.
Объект исследования - асинхронные двигатели.
І. ОБЗОРНАЯ ЧАСТЬ
Транспорт - одно из необходимых общих условий производства. Осуществляя перевозки внутри предприятий, между предприятиями, районами страны и странами, транспорт влияет на масштабы общественного производства и его темпы. Транспорт - это крупная многоотраслевая сфера, включающая все виды грузового и пассажирского транспорта: железнодорожного, автомобильного, морского, речного, трубопроводного, воздушного, промышленного и городского.
В Казахстане транспорт играет исключительно важную роль, и его большое значение обусловлено следующими основными факторами:
обширная территория республики;
дальность перевозок грузов в Казахстане, почти равная среднему показателю по СНГ;
характер произведенной продукции, требующей перемещения на большие расстояния;
транспортно-географическое положение страны - в центре Евразийского континента, между емкими и динамично развивающимися рынками Европы и Юго-Восточной Азии, через которую идут большие потоки транзитных грузов.
В основном перевозка грузов на дальние расстояния осуществляется железнодорожным транспортом, имеет сравнительно невысокую стоимость перевозок.
1. 1. Основные типы и классификация электрических машин
Электрические машины - это электромеханические преобразователи, в которых осуществляется преобразование электрической энергии в механическую или механической в электрическую. Основное отличие электрических машин от других преобразователей в том, что они обратимы, т. е. одна и та же машина может работать в режиме двигателя, преобразуя электрическую энергию в механическую, и в режиме генератора, преобразуя механическую энергию в электрическую.
По виду создаваемого в машинах поля, в котором происходит преобразование энергии, электрические машины подразделяются на индуктивные, емкостные и индуктивно-емкостные . Современные широко применяемые в промышленности и других отраслях народного хозяйства электрические машины - индуктивные. Преобразование энергии в них осуществляется в магнитном поле. Емкостные электрические машины, хотя и были изобретены задолго до индуктивных, до сих пор не нашли практического применения из-за сложности создания достаточно мощного электрического поля, в котором происходит преобразование энергии. Индуктивно-емкостные машины появились лишь в последние годы. Преобразование энергии в них происходит в электромагнитном поле, и они объединяют свойства индуктивных и емкостных электрических машин. В практике эти машины еще не применяются, поэтому в данной работе рассматриваются только индуктивные электрические машины, которые в дальнейшем будут называться просто электрическими машинами.
Для того чтобы электрическая машина работала, в ней должно быть создано вращающееся магнитное поле. Принцип образования вращающегося поля у всех машин один и тот же.
Простейшей электрической машиной является идеальная обобщенная электрическая машина (рис. 1), т. е. машина симметричная, ненасыщенная, имеющая гладкий воздушный зазор. На статоре и роторе такой машины расположены по две обмотки: w s α и w s β на статоре, w r α и w r β на роторе, сдвинутые в пространстве относительно друг друга на электрический угол, равный 90°. Если к обмоткам статора или ротора такой машины подвести токи, сдвинутые во времени на электрический угол 90°, то в воздушном зазоре машины будет вращающееся круговое поле. При симметричном синусоидальном напряжении поле будет синусоидальное, так как идеальная машина не вносит в зазор пространственных гармоник. Все реальные электрические машины в той или иной степени отличаются от идеальной машины, так как в воздушном зазоре реальной машины нельзя получить синусоидальное поле.
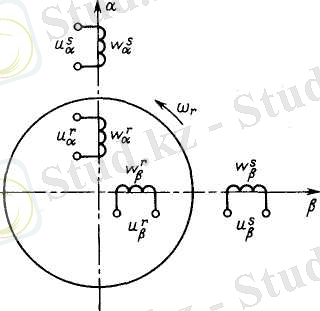
Рисунок - 1. Обобщенная электрическая машина
Для того чтобы МДС, необходимая для создания магнитного поля, не была чрезмерно велика, статор и ротор электрической машины выполняют из ферромагнитного материала, магнитная проводимость которого во много раз больше, чем проводимость неферромагнитной среды (µ ст >>µ 0 ) . При этом магнитные силовые линии поля замыкаются по магнитопроводу машины и практически не выходят за пределы ее активных частей. Участки магнитопровода, в которых поток переменный, для уменьшения потерь на вихревые токи и гистерезис выполняют шихтованными из тонких листов электротехнической стали. Участки магнитопровода машин, в которых поток постоянный (например, полюсы и станины машин постоянного тока), могут быть выполнены массивными из конструкционной стали.
Непременным условием преобразования энергии является изменение потокосцепления обмоток в зависимости от взаимного положения ее частей - статора и ротора. Это условие может быть выполнено при различных вариантах конструктивных форм магнитопровода и при различных конструкциях и расположении обмоток (рис. 2, а - г) . Тот или иной вариант выбирается в зависимости от рода питающего (или генерируемого) тока, наиболее удобного способа создания поля и типа машины. Для преобразования энергии в подавляющем большинстве электрических машин используется вращательное движение.
Электрические машины обычно выполняются с одной вращающейся частью - цилиндрическим ротором и неподвижной частью - статором. Такие машины называются одномерными. Они имеют одну степень свободы. Почти все выпускаемые промышленностью машины - одномерные с цилиндрическим вращающимся ротором и внешним неподвижным статором.
Электромагнитный момент в электрических машинах приложен и к ротору, и к статору. Если дать возможность вращаться обеим частям машины, они будут перемещаться в противоположные стороны. У машин, в которых вращаются и ротор, и статор, две степени свободы. Это двухмерные машины. В навигационных приборах ротором может быть шар, который вращается относительно двух статоров, расположенных под углом 90°. Такие машины имеют три степени свободы. В космической электромеханике встречаются шестимерные электромеханические системы, в которых и ротор, и статор имеют по три степени свободы.
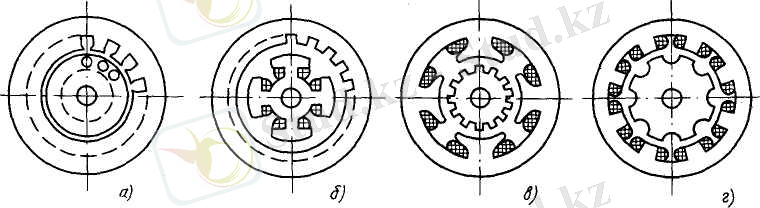
Рисунок - 2. Основные конструктивные исполнения электрических машин: а - асинхронная; б - синхронная; в - коллекторная; г - индукторная
Находят применение также электрические машины, в которых ротор (или и ротор, и статор) имеет форму диска. Такие машины называют торцевыми.
Электрические машины помимо вращательного могут иметь и возвратно-поступательное движение (линейные машины) . В таких машинах статор и ротор разомкнуты и магнитное поле отражается от краев, что приводит к искажению поля в воздушном зазоре.
Краевой эффект в линейных электрических машинах ухудшает их энергетические показатели. Низкие энергетические показатели ограничивают применение электрических машин с возвратно-поступательным движением.
Из обычной машины с цилиндрическим статором и ротором получаются машины с сегментным статором и линейные (рис. 3) . Если увеличить диаметр ротора сегментной машины до бесконечности, получим линейный двигатель (рис. 3, б) .
Линейные двигатели постоянного и переменного тока находят применение в промышленности для получения линейных перемещений.
В генераторном режиме линейные машины практически не применяются.
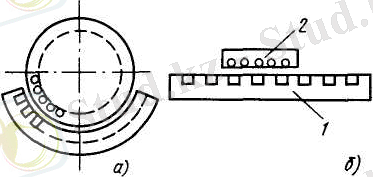
Рисунок - 3. Модификация конструктивного исполнения электрических машин: а - машина с сегментным статором; б - линейный двигатель; 1 - статор; 2 - ротор
В большинстве типов электрических машин магнитное поле создается переменными токами обмоток статора и ротора. Однако существует класс машин, в которых поле создается постоянными токами обмоток, расположенных только на статоре. Преобразование энергии в них происходит за счет изменения магнитного потока в воздушном зазоре из-за изменения его проводимости при вращении ротора. Ротор в таких машинах имеет ярко выраженные зубцы, перемещение которых относительно статора вызывает изменение магнитного сопротивления на участках зазора и потокосцепления обмотки статора. Такие машины называют параметрическими или индукторными . Конструктивные исполнения индукторных машин весьма разнообразны. Наибольшее распространение получила конструкция индукторной машины с двумя роторами 1 и статорами 2 (рис. 4) . Если роторы сдвинуты относительно друг друга на электрический угол 90°, общее магнитное сопротивление машины во время вращения роторов не изменяется и в обмотке возбуждения 3, питающейся постоянным током, не наводится переменная составляющая напряжения. Обмотки на роторах отсутствуют. При работе машины с обмоток переменного тока 4, расположенных в пазах каждого статора, снимается напряжение. Поток возбуждения замыкается по корпусу статора и втулке ротора 5, насаженной на вал.
В зависимости от рода потребляемого или отдаваемого в сеть тока электрические машины подразделяются на машины переменного и постоянного тока. Машины переменного тока делятся на синхронные, асинхронные и коллекторные.

Рисунок - 4. Индукторная машина с двумя роторами
В синхронных машинах поле возбуждения создается обмоткой, расположенной на роторе, которая питается постоянным током. Обмотка статора соединена с сетью переменного тока. В обычном исполнении машин вращающийся ротор с обмоткой возбуждения располагается внутри статора, а статор неподвижен. Обращенная конструкция, при которой ротор с обмоткой возбуждения неподвижен, а вращается статор, в синхронных машинах встречается редко из-за сложности подвода тока к вращающейся обмотке переменного тока.
Ротор синхронной машины может быть явнополюсным, т. е. с явно выраженными полюсами, имеющими ферромагнитные сердечники с насаженными на них многовит-ковыми катушками возбуждения. Роторы синхронных машин, рассчитанных на частоту вращения 1500 и 3000 об/мин и выше, обычно выполняются неявнополюсными. При этом обмотка возбуждения укладывается в профрезерованные в роторе пазы. Обмотка переменного тока синхронных машин, как правило, распределенная, т. е. расположена равномерно по окружности внутреннего диаметра статора в пазах его магнитопровода.
В асинхронных машинах специальная обмотка возбуждения отсутствует, рабочий поток создается реактивной составляющей тока обмотки статора. Этим объясняется простота конструкции и обслуживания асинхронных двигателей, так как отсутствуют скользящие контакты для подвода тока к вращающейся обмотке возбуждения и отпадает необходимость в дополнительном источнике постоянного тока для возбуждения машины. Обмотки статоров и роторов асинхронных машин распределенные и размещены в пазах их магнитопроводов.
На роторах асинхронных машин располагается либо фазная, т. е. имеющая обычно столько же фаз, сколько и обмотка статора, изолированная от корпуса обмотка, либо короткозамкнутая. Короткозамкнутая обмотка ротора состоит из расположенных в пазах ротора замкнутых между собой по обоим торцам ротора неизолированных стержней из проводникового материала. Она может быть также выполнена заливкой пазов алюминием. В зависимости от типа обмотки ротора различают асинхронные двигатели с фазными роторами или асинхронные двигатели с короткозамкнутыми роторами.
Нормальное исполнение асинхронных машин - с ротором, расположенным внутри статора. Однако для некоторых приводов, например привода транспортера, оказывается выгоднее расположить вращающийся ротор снаружи статора. Такие машины называют обращенными или машинами с внешним ротором. Они выполняются обычно с короткозамкнутыми роторами.
Среди коллекторных машин переменного тока получили распространение в основном однофазные двигатели малой мощности. Они находят применение в приводах, к которым подвод трехфазного или постоянного тока затруднен или нецелесообразен (в электрифицированном инструменте, бытовой технике и т. п. ) . В машинах средней и тем более большой мощности коллекторные машины переменного тока в настоящее время в СССР не применяются. Исключение составляют отдельные специальные машины, например машины типа двигателя Шраге - Рихтера.
Большинство машин постоянного тока - это коллекторные машины. Они выпускаются мощностью от долей ватта до нескольких тысяч киловатт. Обмотки возбуждения машин постоянного тока располагаются на главных полюсах, закрепленных на станине. Выводы секций обмотки ротора (якоря) впаяны в пластины коллектора. Коллектор, вращающийся на одном валу с якорем, и неподвижный щеточный аппарат служат для преобразования постоянного тока сети в переменный ток якоря (в двигателях) или переменного многофазного тока якоря в постоянный ток сети (в генераторах постоянного тока) .
Конструкция машин постоянного тока более сложная, стоимость выше и эксплуатация более дорогая, чем асинхронных, поэтому двигатели постоянного тока применяются в приводах, требующих широкого и плавного регулирования частоты вращения, или в автономных установках при питании двигателей от аккумуляторных батарей.
Подавляющее число машин постоянного тока выполняется с коллектором - механическим преобразователем частоты. Но существует несколько типов и бесколлекторных машин, например униполярные генераторы (рис. 5), которые используются для получения больших токов (до 100 кА) при низких напряжениях. В таких машинах коллектор отсутствует, но они могут работать только при наличии скользящего контакта, который состоит из щеток 1 и колец 2. Постоянный магнитный поток, созданный токами обмотки возбуждения 5, замыкается по станине 3, массивному ротору 4 и двум зазорам. Постоянные токи наводятся в массивном роторе и снимаются щетками. Чтобы уменьшить электрические потери в роторе, в нем делают пазы, в которые укладывают медные стержни 6. Стержни, приваренные к контактным кольцам, образуют на роторе короткозамкнутую обмотку.
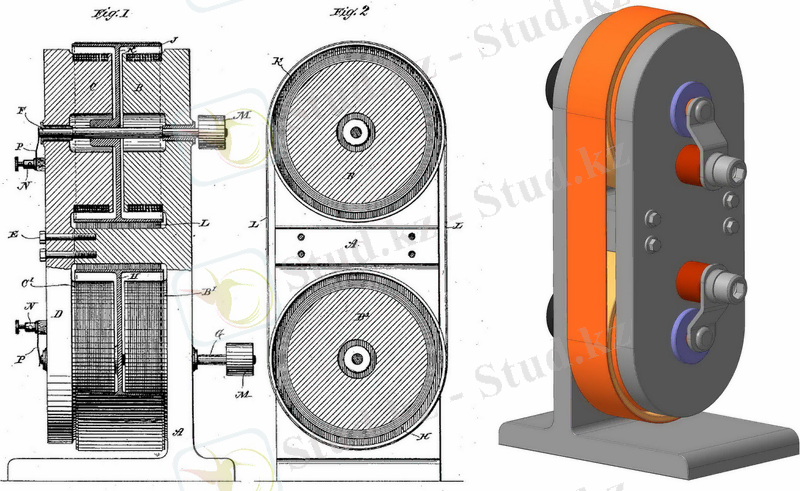
Рисунок - 5. Униполярная электрическая машина
В последние годы получили распространение также бесколлекторные машины постоянного тока с вентильным управлением, в которых механический преобразователь частоты заменен преобразователем частоты на полупроводниковых элементах.
Несмотря на большое число различных типов электрических машин и независимо от их конструктивного исполнения, рода и числа фаз питающего тока и способов создания магнитных полей преобразование энергии в машинах происходит только при следующем условии: во всех электрических машинах в установившихся режимах поля статора и ротора неподвижны относительно друг друга. Поле ротора, которое создается токами, протекающими в обмотке ротора, вращается относительно ротора. При этом механическая частота вращения ротора и частота вращения поля относительно ротора в сумме равны частоте вращения поля статора, поэтому частоты токов в статоре и роторе жестко связаны соотношением f 2 = f 1 s, (1)
где f 1, f 2 - частоты тока и напряжения статора и ротора; s - относительная частота вращения ротора или скольжение, определяемое частотой вращения поля статора n 1 и частотой вращения ротора машины n 2 :
s = (n l ± n 2 ) / n 1 (2)
В синхронных машинах обмотка возбуждения ротора питается постоянным током (f 2 = 0), и, следовательно, из (1) s = 0, откуда по (2) n = n 1 т. е. ротор синхронной машины вращается синхронно с полем, созданным токами обмотки статора.
Жесткая связь частоты тока и частоты вращения определила область применения синхронных машин. Синхронные генераторы являются практически единственными мощными генераторами электрической энергии на электростанциях. Синхронные двигатели с учетом трудностей их пуска применяются как приводы промышленных установок, длительно работающих при постоянной частоте вращения и не требующих частых пусков, например как приводные двигатели воздуходувок, компрессоров и т. п.
В асинхронных машинах ток в обмотке ротора обусловлен ЭДС, наведенной в проводниках обмотки магнитным полем статора.
Наведение ЭДС происходит только при пересечении проводниками магнитных силовых линий поля, что возможно лишь при неравенстве частот вращения ротора и поля статора (n 2 ≠ n 1 ) . Частота тока в роторе равна f 2 = f 1 s, что обеспечивает взаимную неподвижность поля токов ротора и поля статора, а частота вращения ротора при этом равна n 2 = n 1 (1 - s) . При скольжении s = l ротор неподвижен (f 2 = f 1 ), преобразования механической энергии не происходит и имеет место трансформаторный режим работы машины.
При питании обмотки ротора постоянным током машина переходит в синхронный режим работы. При питании ротора переменным током асинхронный двигатель может вращаться с частотой большей, чем частота поля статора. Такие режимы используются редко из-за сложности пуска машины: необходим разгонный двигатель либо преобразователь частоты. Примером двигателя этого типа являются двигатели Шраге - Рихтера, в которых для преобразования частоты тока ротора используется коллектор, соединенный с добавочной обмоткой ротора. Регулирование частоты вращения двигателя производится изменением добавочной ЭДС, вводимой в обмотку ротора, путем изменения положения щеток на коллекторе .
В машинах постоянного тока поле возбуждения создается постоянным током, а поле якоря - переменным. Преобразование постоянного тока сети в многофазный переменный ток якоря происходит с помощью механического преобразователя - коллектора. Частота переменного тока якоря определяется частотой его вращения, и магнитное поле, создаваемое током якоря, неподвижно относительно поля возбуждения машины.
... продолжениеВы можете абсолютно на бесплатной основе полностью просмотреть эту работу через наше приложение.
- Информатика
- Банковское дело
- Оценка бизнеса
- Бухгалтерское дело
- Валеология
- География
- Геология, Геофизика, Геодезия
- Религия
- Общая история
- Журналистика
- Таможенное дело
- История Казахстана
- Финансы
- Законодательство и Право, Криминалистика
- Маркетинг
- Культурология
- Медицина
- Менеджмент
- Нефть, Газ
- Искуство, музыка
- Педагогика
- Психология
- Страхование
- Налоги
- Политология
- Сертификация, стандартизация
- Социология, Демография
- Статистика
- Туризм
- Физика
- Философия
- Химия
- Делопроизводсто
- Экология, Охрана природы, Природопользование
- Экономика
- Литература
- Биология
- Мясо, молочно, вино-водочные продукты
- Земельный кадастр, Недвижимость
- Математика, Геометрия
- Государственное управление
- Архивное дело
- Полиграфия
- Горное дело
- Языковедение, Филология
- Исторические личности
- Автоматизация, Техника
- Экономическая география
- Международные отношения
- ОБЖ (Основы безопасности жизнедеятельности), Защита труда
