Биокинематика и механика опорно-двигательного аппарата человека

Содержание
- Введение . . . 3
- Звенья биокинематических цепей. . …4
- Механизмы соединений. . ……5
- Биокинематические пары и цепи . . . …7
- Движения в биокинематических цепях . . . 7
- Составляющие составного Движения . . . 10
- Степени свободы и связи движений. 11
- Звенья тела как рычаги и маятники . . . 12
- Рычаги в биокинематических цепях . . . 13
- Механические свойства костей и суставов. . …15
- Биомеханические особенности костной системы . . . 16
- Список использованной литературы . . . 22
Введение
Движения человека в значительной мере зависят от того, каково строение его тела и каковы его свойства. Чрезвычайная сложность строения и многообразие свойств тела человека, с одной стороны, делают очень сложными сами движения и управление ими. Но, с другой стороны, они обусловливают необычайное богатство, разнообразие движений, до сих пор недоступное в целом ни одной самой совершенной машине.
Биомеханика изучает в теле человека, в его опорно-двигательном аппарате, преимущественно те особенности строения и функций, которые имеют значение для совершенства движений. Отвлекаясь от деталей анатомического строения и физиологических механизмов двигательного аппарата, рассматривают упрощенную модель тела человека - биомеханическую систему. Она обладает основными свойствами, существенными для выполнения двигательной функции, но не включает в себя множество частных деталей.
Таким образом, биомеханическая система - это упрощенная копия, модель тела человека, на которой можно изучать закономерности движений.
Биомеханическая система тела человека состоит из биомеханических цепей. Множество частей тела, соединенных подвижно, образует биокинематические цепи. К ним приложены силы (нагрузки), которые вызывают деформации звеньев тела и изменение их движений.
Звенья биокинематических цепей
Биокинематические цепи опорно-двигательного аппарата состоят из подвижно соединенных звеньев (твердых, упругих и гибких) и отличаются их переменным составом, своей длиной и формой (составные рычаги и маятники) .
Фиксирование суставов (блокада) и их освобождение (снятие динамических связей - тяги мышц) изменяют число движущихся звеньев в цепи. Она может превратиться как бы в одно звено или сохранять движение в части сочленений или во всех сочленениях.
Расстояние по прямой от проксимального сочленения до конца открытой цепи при ее сгибании-разгибании изменяется. Многозвенные маятники поэтому имеют переменную длину. Это влияет на величину инертного сопротивления (изменения момента инерции) .
Биокинематические цепи, замыкаясь геометрически (связыванием между собой концевых звеньев), изменяют свои свойства (передача усилий, возможности управления) . В частности, возникают составные рычаги со сложной передачей тяг многосуставных мышц. Твердые; Звенья (кости), упругие (мышцы) и гибкие (связки, сами мышцы; и их сухожилия), изменяя степень и характер своего участия в движениях, обеспечивают многообразные возможности движений.
Механизмы соединений
Механизмы соединений звеньев в биомеханических цепях и неодноосных сочленениях позволяют определять требуемое движение благодаря образованию биодинамически полносвязного механизма.
Биодинамически полносвязный механизм (биомеханизм) характеризуется выключением лишних в данном движении степеней свободы. Тяги групп мышц обеспечивают требуемое направление движений звеньев в биокинематических цепях и регулирование их скоростей. Кроме этого, мышцы при необходимости ограничивают и размах движений, затормаживая звенья раньше, чем наступает пассивное ограничение (костно-суставно-связочное) .
Направление движений, скорости звеньев и размах движений в ряде суставов взаимосвязаны благодаря совместному действию многосуставных мышц.
Биокинематические пары и цепи
Соединенные два соседних звена тела образуют пару, а пары, в свою очередь, соединены в цепи.
Биокинематическая пара - это подвижное (кинематическое) соединение двух костных звеньев, в котором возможности движений определяются его строением и управляющим воздействием мышц.
В технических механизмах соединения двух звеньев - кинематические пары - устроены обычно так, что возможны лишь вполне определенные, заранее заданные движения. Одни возможности не огра-ничены (их характеризуют степени свободы движения), другие полностью ограничены (их характеризуют степени связи)
Различают связи: а) геометрические (постоянные препятствия перемещению в каком-либо направлении, например костное ограничение в суставе) и б) кинематические (ограничение скорости, например мышцей-антагонистом) .
В биокинематических парах имеются постоянные степени связи которые определяют собой сколько как максимум и каких остается степеней свободы движения. Почти все биокинематические пары в основном вращательные (шарнирные) ; немногие допускают чисто поступательное скольжение звеньев относительно друг друга и лишь одна пара (голеностопный сустав) - винтовое движение.
Биокинематическая цепь - это последовательное либо незамкнутое (разветвленное), либо замкнутое соединение ряда биокинематических пар (рис. 1) .
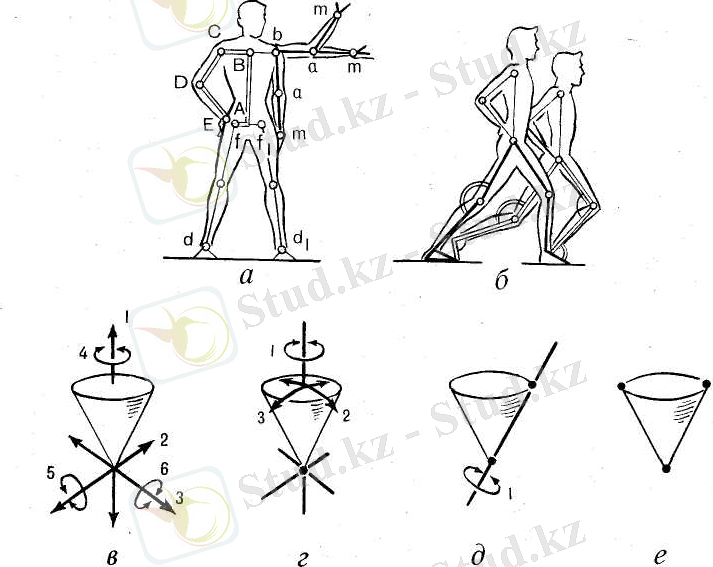
Рис. 1. Биокинематические цепи тела человека: а - виды цепей, bат - незамкнутая, ABCDEA -замкнутая на себя, dff 1 d 1 d - замкнутая через опору; б - взаимосвязь движений в замкнутой цени; в, г, д, е - степени свободы движений тела.
В незамкнутых цепях имеется свободное (конечное) звено, входящее лишь в одну пару. В замкнутых цепях нет свободного конечного звена, каждое звено входит в две пары.
В незамкнутой цепи, следовательно, возможны изолированные движения в каждом отдельно взятом суставе. В двигательных действиях движения в незамкнутых цепях происходят обычно одновременно во многих суставах, но возможность изолированного движения не исключена.
В замкнутой цепи изолированные движения в одном суставе невозможны: в движение неизбежно одновременно вовлекаются и другие соединения (рис. 1 ( б ) ) .
Значительная часть незамкнутых биокинематических цепей оснащена многосуставными мышцами. Поэтому движения в одних суставах через такие мышцы бывают связаны с движениями в соседних суставах. Однако при точном управлении движениями во многих случаях эту взаимную связь можно преодолеть, «выключить». В замкнутых же цепях связь непреодолима и действия мышц обязательно передаются на отдаленные суставы.
Незамкнутая цепь может стать замкнутой, если конечное свободное звено получит связь (опора, захват) с другим звеном цепи (непосредственно или через какое-либо тело) .
Движения в биокинематических цепях
В биокинематических цепях тела человека движение может передаваться от звена к звену. Скорость, например, кисти при броске мяча может быть результатом движений ног и туловища, а также движений в суставах руки. Движение кисти в этом случае как бы составляется из движений других звеньев тела. Движение, обусловленное движениями ряда звеньев, в биомеханике называют составным
Составляющие составного Движения
Составное движение образуется из нескольких составляющих движений звеньев в сочленениях биокинематической цепи.
В простейших случаях в механике складываются два поступательных движения двух тел.
Когда в составном движений принимают участие два тела, то обычно составляющие движения называют переносными и относительными. Платформа как бы переносит на себе движение по ней груза; движение платформы переносное. Движение же груза по платформе относительно системы отсчета, связанной с самой платформой, относительное. Тогда движение груза в неподвижной системе отсчета (Земля) результирующее: это результат двух составляющих движений.
В теле человека таких движений не бывает, так как почти во всех суставах звенья движутся вокруг осей сочленений. В биокинематических цепях обычно движется много звеньев; одни «несут» на себе движения других (несущие и несомые движения) . Несущее движение (например, мах бедром при выносе ноги в беге) изменяет несомое (сгибание голени) .
При движениях в незамкнутой кинематической цепи угловые перемещения, скорости и ускорения, если они направлены в одну сторону, складываются. Разнонаправленные движения не складываются, а вычитаются (суммируются алгебраически) .
Сложнее составные движения, в которых составляющие движения вращательные (по дуге окружности) и поступательные (вдоль радиуса)
В составном движении, образованном из вращательных составляющих движений (в биокинематической цепи), вследствие суммирования равнонаправленных и вычитания разнонаправленных движений в разных суставах всегда происходит прибавление движения и вдоль радиуса (поступательное) . Значит, биокинематическая цепь (по прямой линии - от ее начала до конца) укорачивается или удлиняется (например, при махе рукой, ногой в прыжках) . Вектор v груза повернулся в сторону вращения. Эти два изменения скорости обусловлены ускорением Кориолйса. Когда биокинематическая цепь укорачивается, кориолисово ускорение звеньев, приближающихся к оси вращения, направлено навстречу вращению, а когда удлиняется, - в сторону вращения. От кориолйсова ускорения зависит убыстрение и замедление углового поворота, что можно объяснить появлением кориолйсовых сил инерции.
В биокинематических цепях с большим числом степеней свободы движений кинематика очень сложна. Каждое движение в сочленениях незамкнутой цепи (например, свободной конечности) влияет на траектории, скорости и ускорения более отдаленных звеньев. В этих случаях характеристики составных движений проще регистрировать, чем рассчитывать. Чаще всего определить их заранее нельзя: слишком уж много возможных вариантов. В процессе тренировки происходит согласование движений звеньев, необходимое для достижения цели, обеспечивается необходимая плавность и рациональная форма траекторий, происходит согласование величины и направлений скоростей; регулируется быстрота нарастания и снижения ускорений. Последнее определяет резкость движений и зависит от быстроты увеличения и ослабления усилий. Одновременно ритмы движений звеньев и цепей согласуются в общий ритм действия. Происходит сложная интеграция движений биомеханической системы посредством процесса управления движениями.
В зависимости от направления скоростей движения звеньев тела человека могут быть возвратно-вращательными, возвратно-поступательными и круговыми.
Строение сочленений не позволяет совершать движения в суставах по «принципу колеса», т. е. делать неограниченный поворот вокруг оси сустава в одну сторону. Поэтому почти все движения имеют возвратный характер. Возвратно-вращательные движения напоминают движения маятника вокруг оси, расположенной поперек биокинематической цепи (сгибание-разгибание) или продольно (супинация-пронация) .
Определенное согласование вращательных движений в различных суставах биокинематической цепи позволяет конечным звеньям двигаться поступательно (кисть боксера при вращательных движениях в плечевом и локтевом суставах; туловище бегуна при отталкивании ногой) . Пример возвратно-поступательного движения - работа пилой, напильником. В этих случаях угловые скорости противоположно направленных движений одинаковы (пара скоростей) .
Наконец, в шаровидных суставах возможно сложное круговое движение, когда продольная ось звена описывает коническую поверхность. При этом согласуются два движения: самой продольной оси и звена вокруг этой оси. Только такое конусообразное движение и может выполняться без обязательных возвратных движений.
В возвратных движениях имеется критическая точка, в которой происходит смена направления движения (амортизации на отталкивание - в беге, заноса весла на гребковое движение - в гребле, замаха ракеткой на ударное движение - в теннисе) . В каждом суставе направления и размах движений ограничены. Значит, звено в суставе может занимать не любое, а лишь анатомически возможное положение. Однако из бесчисленного множества возможных движений только малая часть вызвана потребностями человека и отвечает энергетическим требованиям. Эти движения отобраны и закрепились в человеческой практике как наиболее рациональные, стали привычными к общеупотребительными.
Степени свободы и связи движений
Если у физического тела нет никаких ограничений (связей), оно может двигаться в пространстве во всех трех измерениях, т. е. относительно трех взаимно перпендикулярных осей (поступательно), а также вокруг них (вращательно) . Следовательно, у такого тела шесть степеней свободы движения (рис. 1( в) ) .
Каждая связь уменьшает число степеней свободы. Зафиксировав одну точку свободного тела, сделав его звеном пары, сразу лишают его трех степеней свободы - возможных линейных перемещений вдоль трех основных осей координат. Примером может служить шаровидный сустав - тазобедренный, в котором три степени свободы из шести (возможно вращение относительно трех осей) (рис. 1 (г) ) . Закрепление двух точек звена говорит о наличии оси, проходящей через эти точки. В таком случае остается одна степень свободы. Пример подобного ограничения - одноосный сустав, например межфаланговый (рис. 1 (д) ) . Закрепление третьей точки, не лежащей на этой оси, полностью лишает звено свободы движений (рис. 10 ( ё) ) . Такое соединение к суставам не относится. В анатомии выделяют также двуосные суставы; они имеют вторую степень свободы вследствие неконгруэнтности (неполного соответствия по форме) суставных поверхностей (суставы лучезапястный и пястнофаланговый 1-го пальца) .
Почти во всех суставах (кроме межфаланговых, лучелоктевых и атлантоосевого) степеней свободы больше, чем одна. Поэтому устройство пассивного аппарата в них обусловливает неопределенность движений, множество возможностей движений («неполносвязный механизм») . Управляющие воздействия мышц вызывают дополнительные связи и оставляют для движения только одну степень свободы («полносвязный механизм») . Так обеспечивается одна-единственная возможность движений - именно та, которая требуется.
Каждая биомеханическая пара многоосного сустава заключает в себе возможности многих механизмов (А. А. Ухтомский) . Из множества возможностей при помощи управляющих воздействий мышц выделяют заданное управляемое движение. Биокинематические соединения богаче возможностями, чем кинематические соединения в технических механизмах, но управление ими сложнее.
Следовательно, множество степеней свободы кинематической пары в многоосных суставах требует для выполнения каждого определенного движения:
а) выбора необходимой траектории,
б) управления движением по траектории (направлением и величиной скорости) и
в) регуляции движения, понимаемой как борьба с помехами, сбивающими с траектории.
Звенья тела как рычаги и маятники
Разбиение тела человека на звенья позволяет представить эти звенья как механические рычаги и маятники, потому что все эти звенья имеют точки соединения, которые можно рассматривать либо как точки опоры (для рычага), либо как точки отвеса (для маятника) .
Рычаг характеризуется расстоянием между точкой приложения силы и точкой вращения. Рычаги бывают первого и второго рода.
Рычаг первого рода или рычаг равновесия состоит только из одного звена. Пример - крепление черепа к позвоночнику.
Рычаг второго рода характеризуется наличием двух звеньев. Условно можно выделить рычаг скорости и рычаг силы в зависимости от того, что преобладает в их действиях. Рычаг скорости дает выигрыш в скорости при совершенствовании работы. Пример - локтевой сустав с грузом на ладони. Рычаг силы дает выигрыш в силе. Пример - стопа на пальцах.
Поскольку тело человека выполняет свои движения в трехмерном пространстве, то его звенья характеризуются степенями свободы, т. е. возможностью совершать поступательные и вращательные движения во всех измерениях. Если звено закреплено в одной точке, то оно способно совершать вращательные движения и мы можем сказать, что оно имеет три степени свободы.
Закрепление звена приводит к образованию связи, т. е. связанному движению закрепленного звена с точкой закрепления.
Поскольку руки и ноги человека могут совершать колебательные движения, то к механике их движения применимы те же формулы, что и для простых механических маятников. Основные вывод их них - собственная частота колебаний не зависит от массы качающегося тела, но зависит от его длины (при увеличении длины частота колебаний уменьшается) .
Делая частоту шагов при ходьбе или беге или гребков при плавании или гребле резонансной (т. е. близкой к собственной частоте колебаний руки или ноги), удается минимизировать затраты энергии. При наиболее экономичном сочетании частоты и длины шагов или гребков человек демонстрирует существенный рост работоспособности. Простой пример: при беге высокий спортсмен имеет большую длину шага и меньшую частоту шагов, чем более низкорослый спортсмен, при равной с ним скорости передвижения.
Рычаги в биокинематических цепях
Костные рычаги - звенья тела, подвижно соединенные в суставах под действием приложенных сил, - могут либо сохранять свое положение, либо изменять его. Они служат для передачи движения и работы на расстояние.
Все силы, приложенные к звену как рычагу, можно объединить в две группы: а) силы или их составляющие, лежащие в плоскости оси рычага (они не могут повлиять на движение вокруг этой оси) и б) силы или их составляющие, лежащие в плоскости, перпендикулярной к оси рычага (они могут влиять на движение вокруг оси в двух противоположных направлениях) . Рассматривая действие сил на рычаг, учитывают только силы, направленные по ходу движения (движущие) и против него (тормозящие) .
Когда группы сил приложены по обе стороны от оси (точки опоры) рычага, его называют двуплечим или рычагом первого рода (рис. 2 ( а) ), а когда по одну сторону - одноплечим, или рычагом второго рода (рис. 2 (6) ) . Для разных мышц, прикрепленных в разных местах костного звена, рычаг может быть разного рода. Так, относительно своих сгибателей предплечье (при работе против веса груза) представляет собой одноплечий рычаг; относительно же мышц-разгибателей (при удержании груза над головой) - двуплечий рычаг.
При преодолевающих движениях сила сокращающихся мышц (их равнодействующая тяга) - движущая сила, при уступающих движениях сила растягиваемых мышц (их равнодействующая тяга) - тормозящая. Силы сопротивления направлены противоположно действию мышц.
Каждый рычаг имеет следующие элементы (рис. 2 ( в ) ) :
а) точку опоры (0),
б) точки приложения сил,
в) плечи рычага (расстояния от точки опоры до точек приложения сил - l ),
г) плечи сил (расстояния от точки опоры до линий действия сил - опущенные на них перпендикуляры- d) .
Мерой действия силы на рычаг служит ее момент относительно точки опоры (произведение силы на ее плечо) .
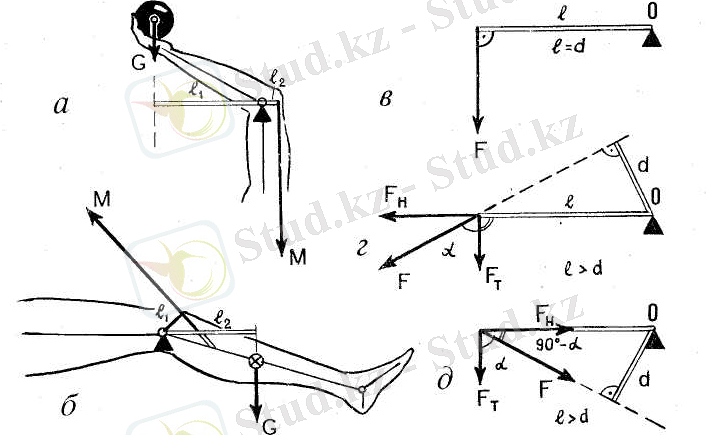
Рис. 2. Костные рычаги: а - двуплечий, 6 - одноплечий; вращающая составляющая (Ft) и укрепляющая (F H ) силы при углах ее приложения: в - в прямом, г - тупом, д - остром
Механические свойства костей и суставов
Механические свойства костей определяются их разнообразными функциями; кроме двигательной, они выполняют защитную и опорную функции. Так кости черепа и грудной клетки защищают внутренние органы, а кости позвоночника и конечностей выполняют опорную функцию.
Выделяют 4 вида механического воздействия на кость: растяжение, сжатие, изгиб и кручение.
Установлено, что прочность кости на растяжение почти равна прочности чугуна. При сжатии прочность костей еще выше. Самая массивная кость - большеберцовая (основная кость бедра) выдерживает силу сжатия в 16-18 кН.
Менее прочны кости на изгиб и кручение. Однако регулярные тренировки приводят к гипертрофии костей. Так, у штангистов утолщаются кости ног и позвоночника, у теннисистов - кости предплечья и т. п.
Механические свойства суставов зависят от их строения. Суставная поверхность смачивается синовиальной жидкостью, которую хранит суставная сумка. Синовиальная жидкость обеспечивает уменьшение трения в суставе примерно в 20 раз. При этом при снижении нагрузки на сустав жидкость поглощается губчатыми образованиями сустава, а при увеличении нагрузки она выжимается для смачивания поверхности сустава и уменьшения коэффициента трения.
... продолжениеВы можете абсолютно на бесплатной основе полностью просмотреть эту работу через наше приложение.
- Информатика
- Банковское дело
- Оценка бизнеса
- Бухгалтерское дело
- Валеология
- География
- Геология, Геофизика, Геодезия
- Религия
- Общая история
- Журналистика
- Таможенное дело
- История Казахстана
- Финансы
- Законодательство и Право, Криминалистика
- Маркетинг
- Культурология
- Медицина
- Менеджмент
- Нефть, Газ
- Искуство, музыка
- Педагогика
- Психология
- Страхование
- Налоги
- Политология
- Сертификация, стандартизация
- Социология, Демография
- Статистика
- Туризм
- Физика
- Философия
- Химия
- Делопроизводсто
- Экология, Охрана природы, Природопользование
- Экономика
- Литература
- Биология
- Мясо, молочно, вино-водочные продукты
- Земельный кадастр, Недвижимость
- Математика, Геометрия
- Государственное управление
- Архивное дело
- Полиграфия
- Горное дело
- Языковедение, Филология
- Исторические личности
- Автоматизация, Техника
- Экономическая география
- Международные отношения
- ОБЖ (Основы безопасности жизнедеятельности), Защита труда
