LEGO MINDSTORMS EV3 негіздері: робототехника курсының оқу-жоспары

Просмотр содержимого документа
«Робототехника. Саба? жоспары»
Жаңа сабақты түсіндіру
Топпен жұмыс

Презентация арқылы жаңа сабақты түсіндіру.
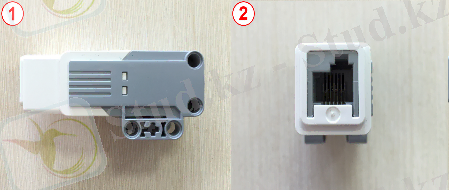
Мұғалім презентация арқылы Курс жабдығымен таныстырады; Мотор робот үшін электр қуатын қозғалыс қуатына айналдырадынын оқушыларға түсіндіру.
Презентация
Плакат, маркер
С=2ПR, R=

- Алға 50 cм қозғалып 90º бұрылсын
- Алға 75 см қозғалып 180º бұрылсын
- Алға 48 см қозғалып 45º бұрылсын
- Алға 62 см қозғалып 270º бұрылсын
«План Джумагулова А. 1 день »
Ұйымдастыру кезеңі.
3 минут
Сергіту сәті
3 минут
Рефлексия
2 минут
Үй тапсырмасы
2 минут
Келесі іс-әрекет,
үй тапсырма:
Тапсырмаға ескертпе,
кері байланыс
«План Джумагулова А. 2 день»
Ұйымдастыру кезеңі.
3 минут
Сергіту сәті
3 минут
Рефлексия
2 минут
Үй тапсырмасы
2 минут
Келесі іс-әрекет,
үй тапсырма:
Тапсырмаға ескертпе,
кері байланыс
«План Джумагулова А. 3 день»
Ұйымдастыру кезеңі.
3 минут
Үй тапсырмасы:
5 минут
Оқушыларға сұрақтар арқылы ұй тапсырмасын тексеру:
1. роботтарды тарихы
2. олардың болашағы туралы не айтуға болады.
3. жалпы роботтардың сипаттамасын
Сергіту сәті
3 минут
Бағдарламаны EV3 модуліне жүктеу жолдарын айтып, оны іске қосуды үйретеді.
Бағдарламаны жүктеу жолдарын меңгерту.
Рефлексия
2 минут
Үй тапсырмасы
2 минут
Келесі іс-әрекет,
үй тапсырма:
Тапсырмаға ескертпе,
кері байланыс
«План Джумагулова А. 10 день »
Сыныпқа жарыстың басталуы туралы хабарлау.
Идеялардың таныстырылымы.
Ұйымдастыру кезеңі.
3 минут
Үй тапсырмасы:
5 минут
Әр топтағы оқушы БББ кестесі бойынша Робот ұғымына не білетіндіктерін, не білгендерін және білгісі келетінін толтыртады.
Одан кейін қарама қарсы топқа параққа жазып сұрақты қояды. Олар оқып бір -бірімен талқылайды.
Берілген тапсырма бойынша дәптерге жұмысты көрсету



Сергіту сәті
3 минут
Рефлексия
2 минут
1. Бүгінгі сабақта үйренгендеріңіздің ішінен өзіңіздің дайындығыңызға нені пайдаланамын деп ойлайсыз?
2. Бүгінгі сабақта сізге бəрінен де не ұнады?
3. Бүгінгі сабақта қандай да бір түсініксіз сұрақтар болды ма? Бұл мəселені қалай шештіңіз/шешесіз?
4. Бүгінгі сабақта үйренгеніңіздің ішінен ең пайдалысы не болды (білім немесе дағдылар) ?
5. Кез-келген өзге де пікірлер:
Үй тапсырмасы
2 минут
Сыныпқа жарыстың басталуы туралы оқу
Идеялардың таныстырылымы оқу
Келесі іс-әрекет,
үй тапсырма:
Тапсырмаға ескертпе,
кері байланыс
«План Джумагулова А. 4 деньdocx»
Ұйымдастыру кезеңі.
3 минут
Үй тапсырмасы:
5 минут
Конверт әдісі бойынша оқушылардан үй тапсырмасын сұрақтар арқылы сұралады.
1. Мотор дегеніміз не? Негізгі қызметтері қандай?
2. Үлкен мотор туралы қысқаша мәлімет
3. Орташа мотор туралы қысқаша мәлімет
Сергіту сәті
3 минут
Бағдарламаны EV3 модуліне жүктеу жолдарын айтып, оны іске қосуды үйретеді.
Бағдарламаны жүктеу жолдарын меңгерту.
Рефлексия
2 минут
Үй тапсырмасы
2 минут
Келесі іс-әрекет,
үй тапсырма:
Тапсырмаға ескертпе,
кері байланыс
«План Джумагулова А. 5 день»
- Іс жүргізу
- Автоматтандыру, Техника
- Алғашқы әскери дайындық
- Астрономия
- Ауыл шаруашылығы
- Банк ісі
- Бизнесті бағалау
- Биология
- Бухгалтерлік іс
- Валеология
- Ветеринария
- География
- Геология, Геофизика, Геодезия
- Дін
- Ет, сүт, шарап өнімдері
- Жалпы тарих
- Жер кадастрі, Жылжымайтын мүлік
- Журналистика
- Информатика
- Кеден ісі
- Маркетинг
- Математика, Геометрия
- Медицина
- Мемлекеттік басқару
- Менеджмент
- Мұнай, Газ
- Мұрағат ісі
- Мәдениеттану
- ОБЖ (Основы безопасности жизнедеятельности)
- Педагогика
- Полиграфия
- Психология
- Салық
- Саясаттану
- Сақтандыру
- Сертификаттау, стандарттау
- Социология, Демография
- Спорт
- Статистика
- Тілтану, Филология
- Тарихи тұлғалар
- Тау-кен ісі
- Транспорт
- Туризм
- Физика
- Философия
- Халықаралық қатынастар
- Химия
- Экология, Қоршаған ортаны қорғау
- Экономика
- Экономикалық география
- Электротехника
- Қазақстан тарихы
- Қаржы
- Құрылыс
- Құқық, Криминалистика
- Әдебиет
- Өнер, музыка
- Өнеркәсіп, Өндіріс
Қазақ тілінде жазылған рефераттар, курстық жұмыстар, дипломдық жұмыстар бойынша біздің қор #1 болып табылады.

Ақпарат
Қосымша
Email: info@stud.kz